今回も二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
Robovie-nano(ロボビーナノ)の調整
サーボモータの調整行程
組み立てまでは前回の記事を見ていただければと思います。
【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【組立編】
ヴイストン株式会社さんのYouTube動画を見ながら進めると分かりやすいです。
バッテリーの充電
サーボモータの位置補正には時間がかかるので、バッテリーを充電しておく必要があります。
バッテリーを充電器につなぐとこんな感じです。
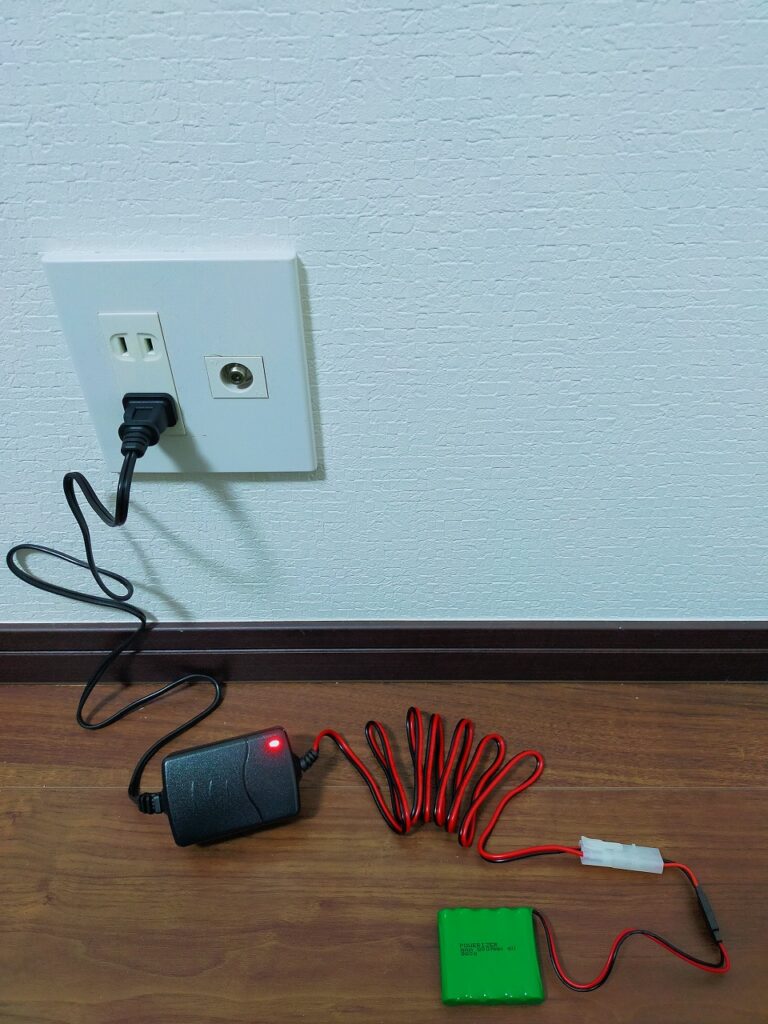
充電器のライトが赤く点灯しました。
1時間ほど後に見てみたら充電器のライトが緑になっていました。

充電が完了したバッテリーを本体に取り付けて準備完了です。
必要な充電時間の詳細は分からないです!
なお、アルインコの安定化電源を使えばバッテリー不要なんですが、ロボット本体との接続に使うケーブルがないので使えずにいます。
サーボモータの位置補正
ロボット本体のスイッチがOFFなのを確認し、PC⇔CPUボード⇔バッテリーを接続します。
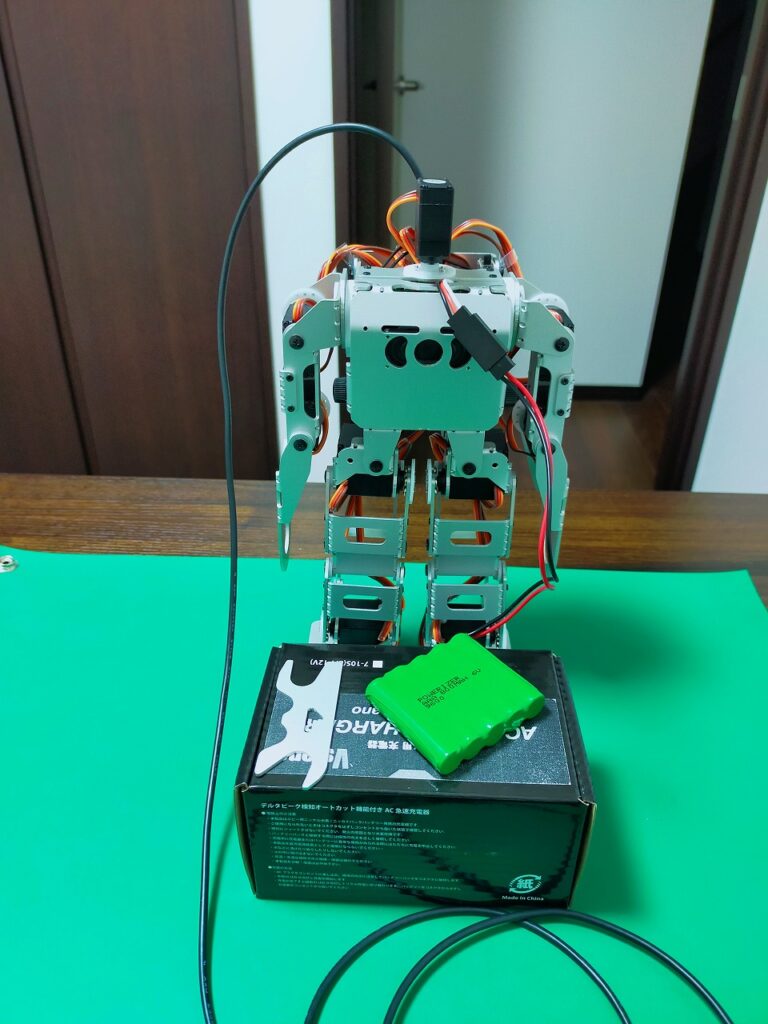
この時はバッテリーを中に格納できていなかったので、充電器の空き箱に乗せてやってました。
RobovieMaker2を起動し、取扱説明書の通り順番に補正していきます。
おぉっ!調整してると技術者って感じがします!
初期位置調整用ジグを使って調整しましょう。
調整が完了したらCPUボードへの書き込みを行い、サーボモータの位置補正完了です。
Robovie-nano(ロボビーナノ)の操作
コントローラとの接続
コントローラとロボット本体の電源を入れます。
コントローラのSELECTボタンを押しながらSTARTボタンを押します。
本体のサーボモータがONになり、Robovie-nanoがシャキッとします。
あれ?何も反応しません…
本体の受信モジュールが怪しいですね。
ロボット本体のスイッチを入れたら受信モジュールのLEDが光るのですが、光ってませんでした。
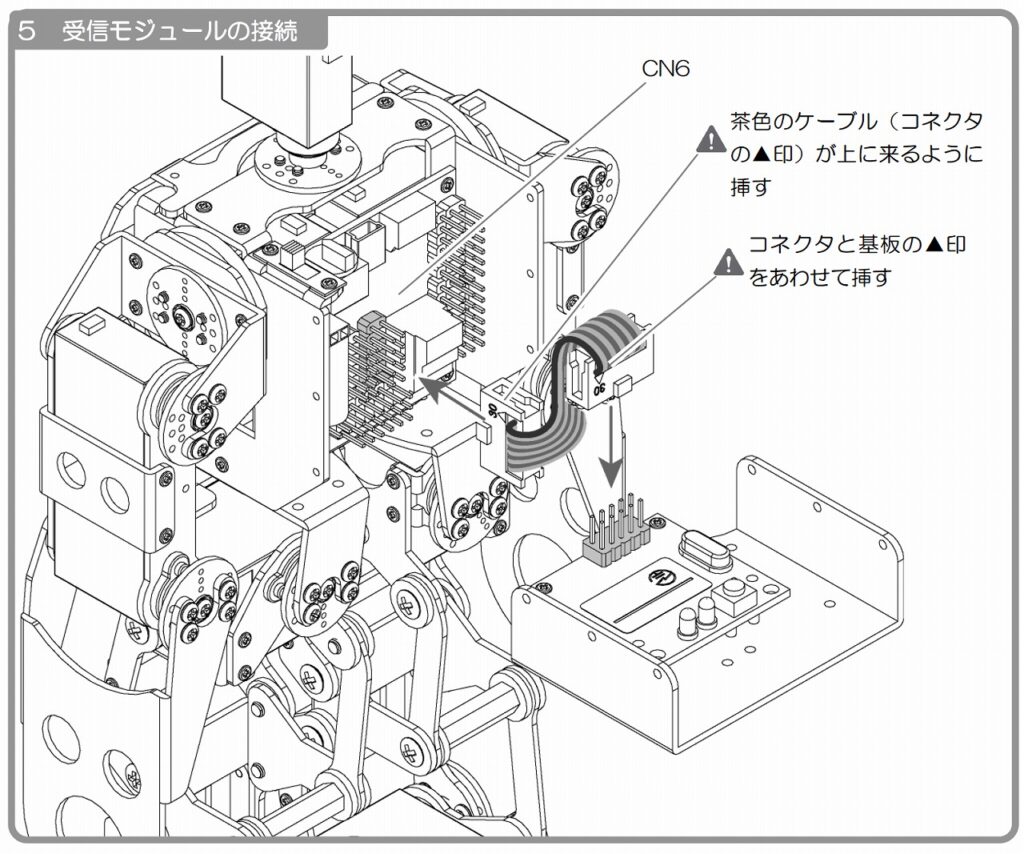
【出典:Robovie-nano取扱説明書(ver1.04)72ページ目】
取扱説明書には「コネクタと基板の▲印をあわせて挿す」とありますが、本体セットのフラットケーブルには▲印がないので適当に挿していたのが原因でした。
受信モジュールの右端のピンが▼なので、ここと本体のCPUボードの上のピンを接続します。
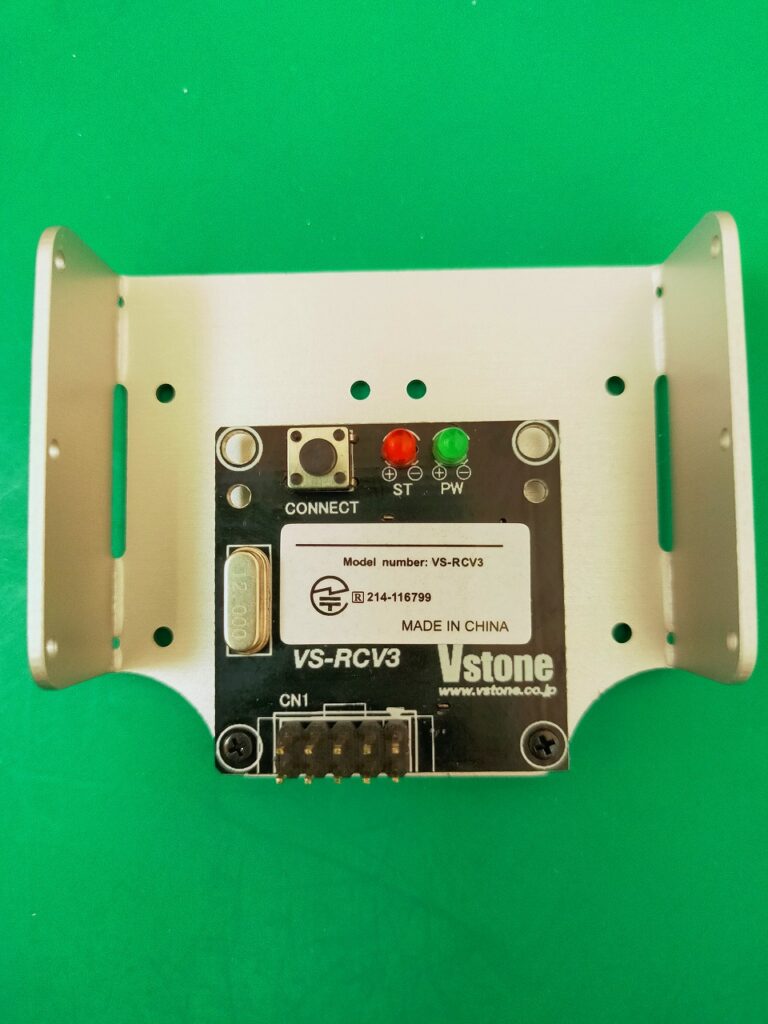
ロボット本体のスイッチを入れて受信モジュールのLEDが光るとこんな感じです。
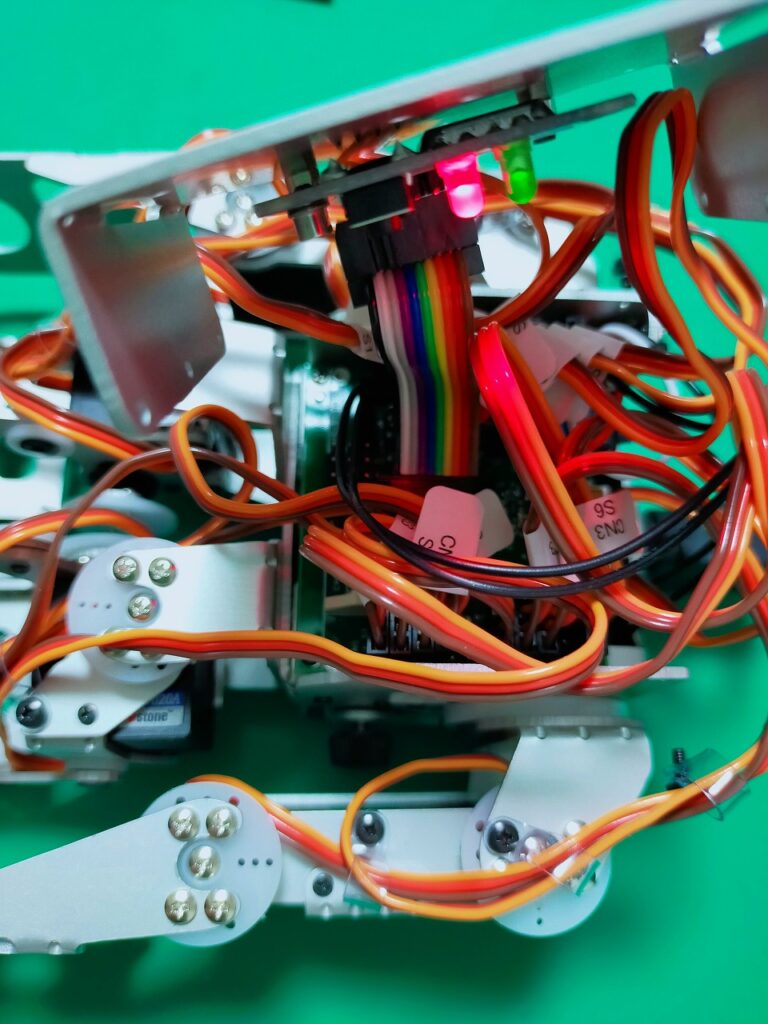
おぉっ!今度はコントローラと本体が接続できました!
受信モジュールやCPUボードが壊れなくて良かったですね。
コントローラと本体を接続すると、ボタンに応じて標準で設定されている動作を行います。
コントローラでの操作
せっかく動くようになったので動画にしました。
CPUボードにあるモードスイッチでオートデモ・自己紹介の動作をやろうとしたのですが、調整が追い付かず転倒してしまうので手動で操作しました。
こんなに小さいのに2足歩行するなんて凄すぎ!
そうですね。ただ、机から落ちたRobovie-nanoが心配です。
この時は大丈夫でしたが次の動画撮影時に修理が必要となりました…。
左足の調整に問題があるのか、それとも床が悪いのか、まっすぐ歩かせることができませんでした。
YAW軸の拡張をすることで解決すれば良いなと思っています。
はぁ~自分で組み立てたロボットが二足歩行する姿に感動しました!
動くときに本体胸部のスピーカから音が出るのも面白い!
小さくてチョコチョコと動く姿に家族からもカワイイの声がありました!
ようやく動かすところまで来ましたね。
おめでとうございます。
それでは今回はここまでにしましょう。
まとめ:文系出身でも二足歩行ロボットはいじれる!
以上で【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【調整・動作編】の説明は終わりです。
お疲れ様でした。
コントローラと接続できなかったときは焦りましたが、それを解決して二足歩行した姿を見たときには「すげー!」という興奮と感動がありました。
引き続きRobovie-nanoのオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。


コメント