
前回に引き続き、二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
ロボットって文系出身でも組み立てられるもの?
まずは公式のWebページで情報収集
内容物の確認までについては前回の記事を見ていただければと思います。
【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【準備編】
ヴイストン株式会社さんの公式Webページから取扱説明書のpdfファイルがダウンロードできます。

ちなみに2022年12月30日の段階ではRobovie-nano取扱説明書は1.04版でした。
また、ヴイストン株式会社さんはYouTubeに動画もアップロードしてくれているため、取扱説明書だけでは分かりにくいところを動画で確認することができます。
いよいよ組み立て…の前に①工具の準備

【出典:Robovie-nano取扱説明書(ver1.04)5ページ目】
そんなこんなで精密ドライバのセットを買ってきました。
ENGINEER(エンジニア)というメーカーのものです。
#0000/#000/#00/#0/#1/#1の6本が入って1,280円 (税込)というお値段ですが高いのか安いのかは全然分かりません。
長さ違いで#1が2本あるのは何でですかね?


いよいよ組み立て…の前に②CPUボードの初期化
取扱説明書の「3.組み立て」に入るのですが、まず設定ソフトのRobovieMaker2のインストールを行います。
PCへのソフトウェアのインストールについては特に紹介することはありません。
インストール後にCPUボードとPCをつないでCPUボードの初期化を行います。

おぉっ!なんか技術者っぽくてテンション上がります↑↑
CPUボードはロボットの頭脳なので丁寧に扱ってくださいね。
いよいよ組み立て…の前に③サーボモータの原点調整
サーボモータの原点調整を行う前に、すべて(※15個)のサーボモータのケーブルにナンバーシールを貼る必要があります。

記念すべき初シール貼り!でも、あと14個もあるのか~
性能に影響が出るところではないのでサクサク進めましょうね。
無心になってナンバーシールを貼り終えた結果が以下です。

お次は?って取説に気になることが書いてあるぞ!

本体のシールは15枚だったからヨー軸拡張セット用のシールないんですけど?
落ち着いてYAW軸拡張セットを見てください。

おぉっ!入ってました~
実際、こんなどうでも良いところで5分ぐらい探したり悩んだりしました。
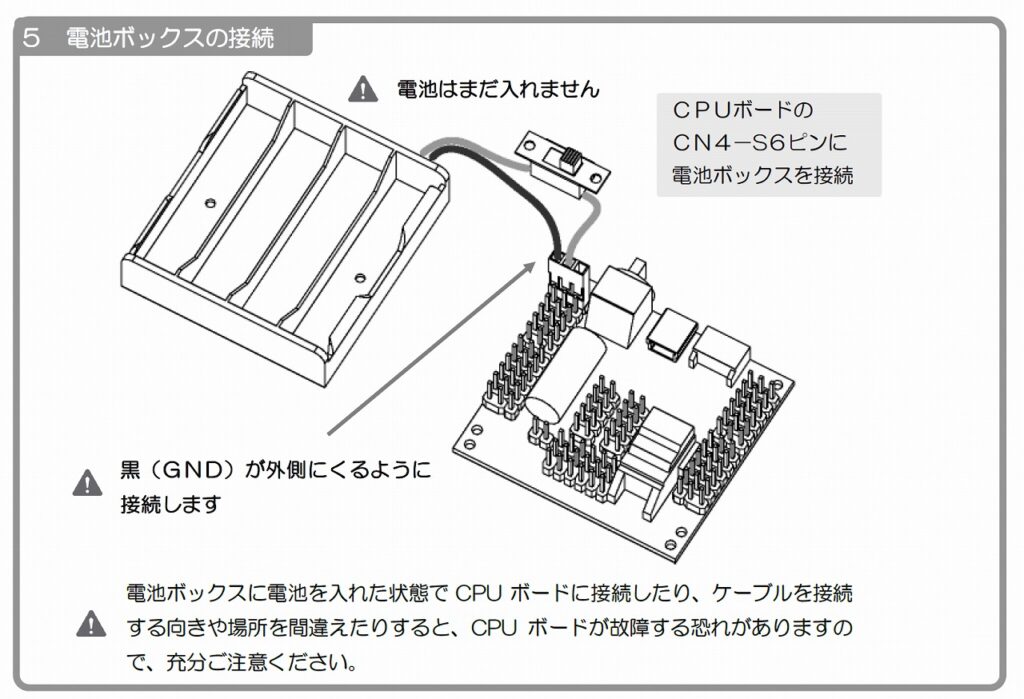
取説だと次は電池ボックスですが、バッテリーセット買っているので飛ばします。
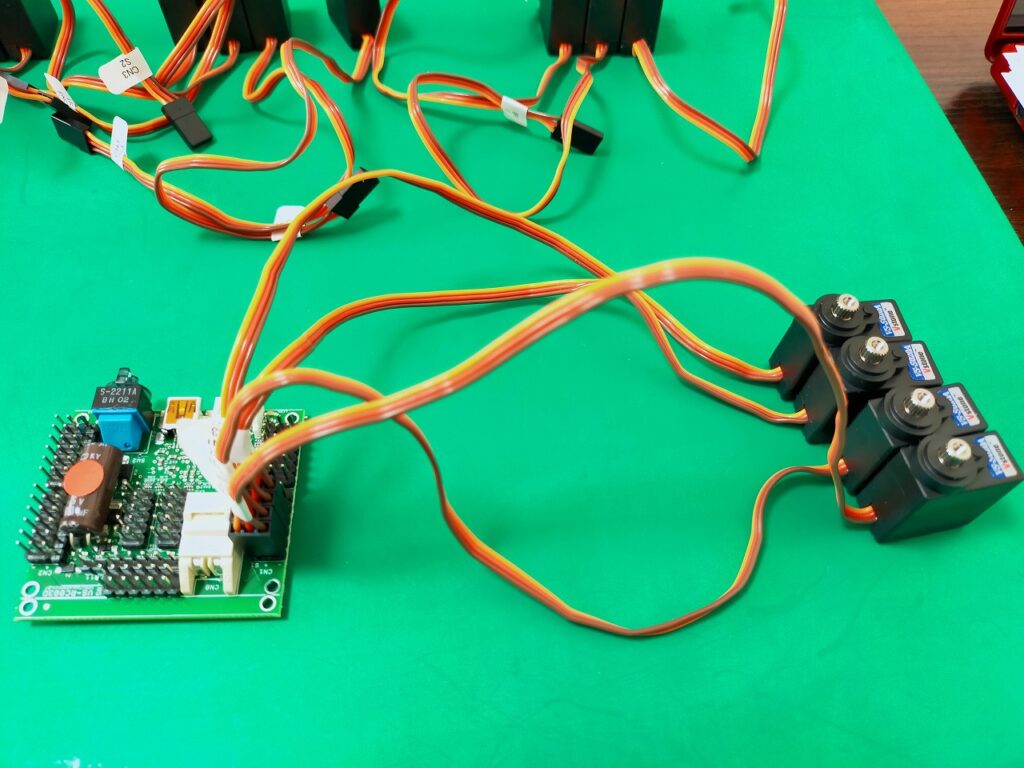
サーボモータのCN1グループをCPUボードに接続しました。
1個目は結構緊張しましたが、スポッとハマってくれます。
取説に記載のある通り、外側に茶色のケーブルが来るようにしましょうね。
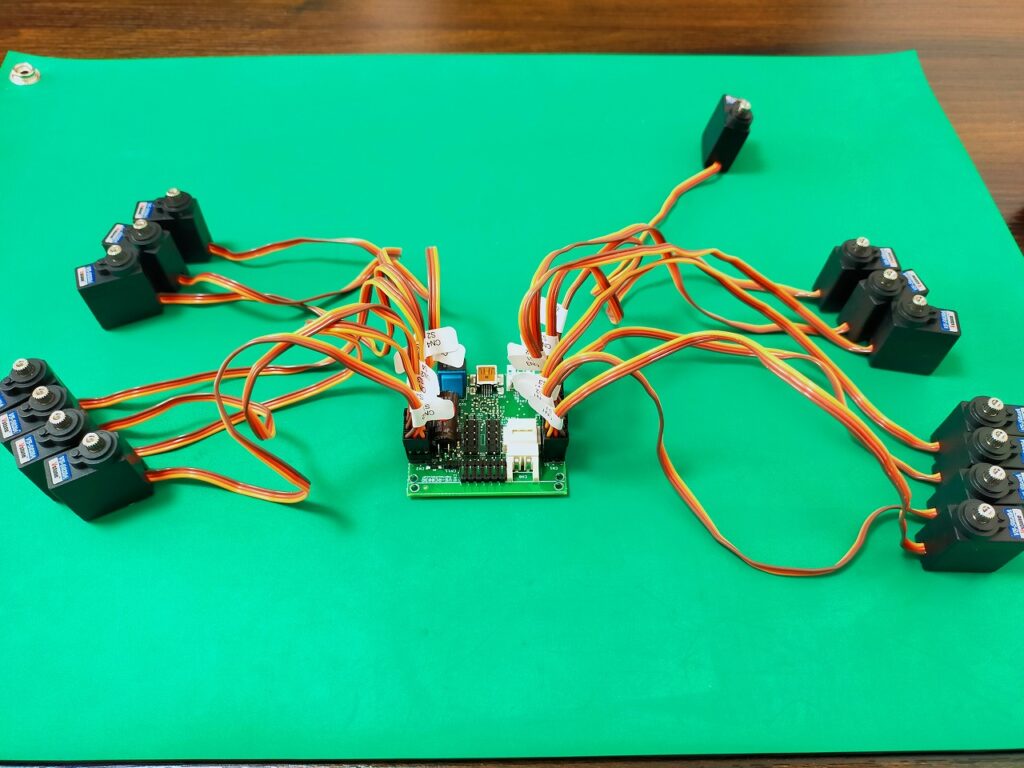
サーボ15個、接続完了しました!
ここでケーブルの向きや接続箇所の確認をしておきましょう。
サーボモータをCPUボードに接続したら、いよいよサーボモータの原点調整です。
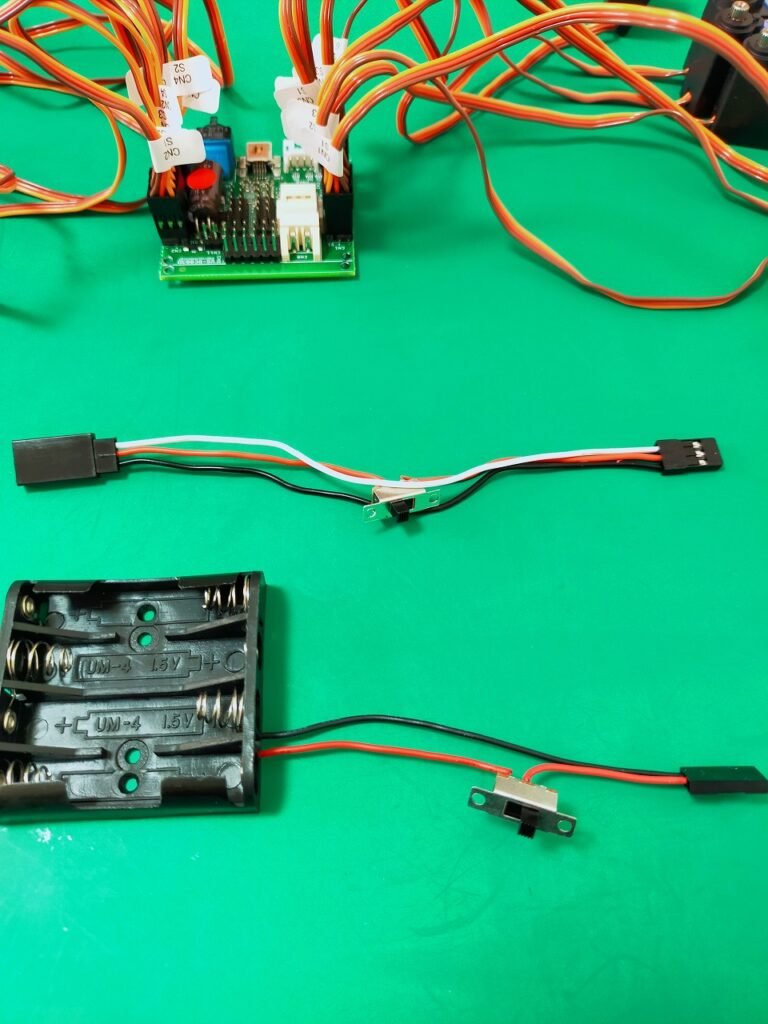
電池ボックスに電池を入れてスイッチをONにする必要があります。
ここはバッテリーセットを買っていたから飛ばしていた所なので代わりにバッテリーをつなぎます。
このバッテリーって充電必要なのでしょうか?
せっかくマルチテスターがあるので使ってみましょうか。
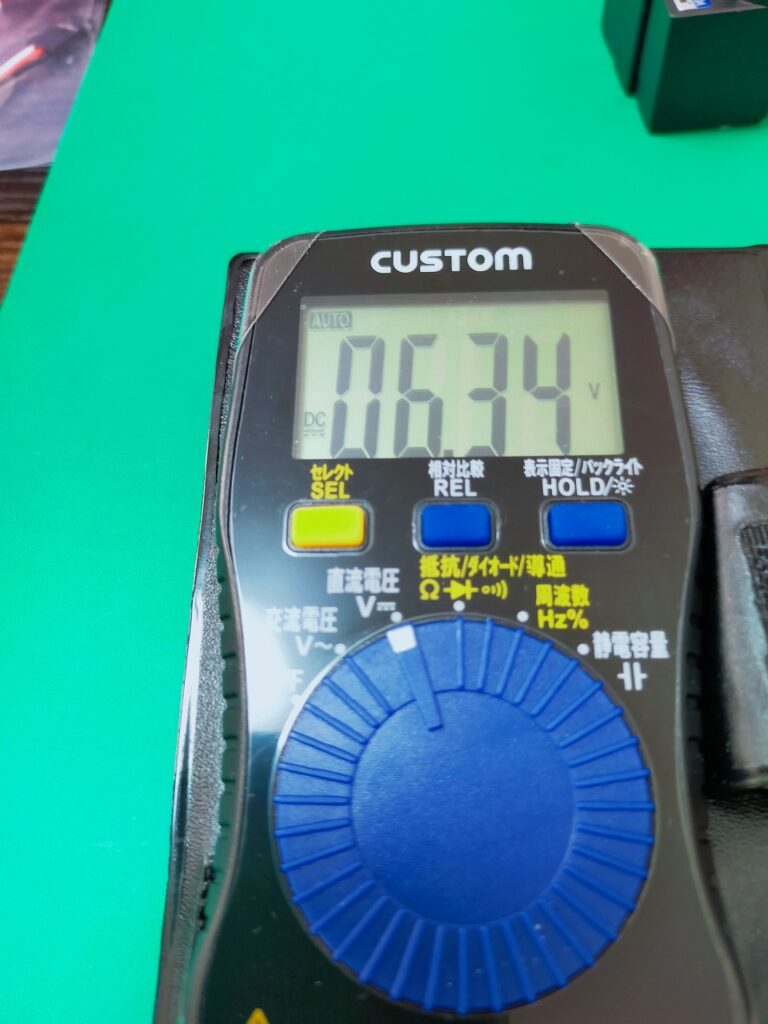
直流電圧で6Vあるから大丈夫そうです!
取説通り、PC⇔CPUボード⇔バッテリーを接続するとこんな感じです。
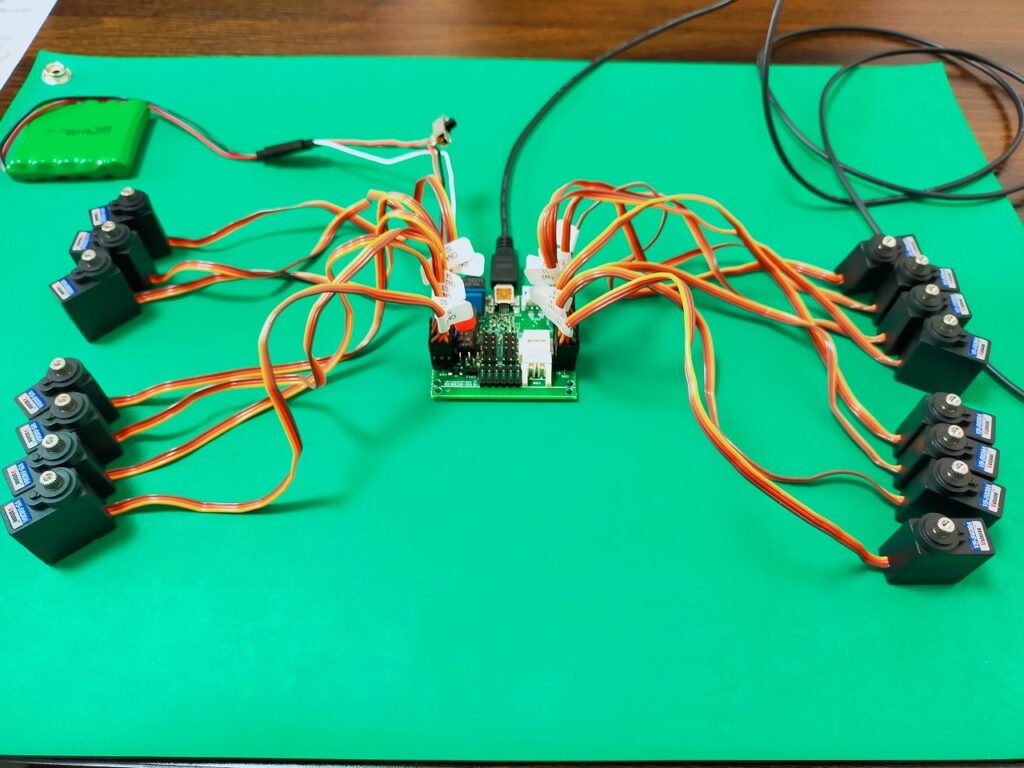
おぉっ!なんだか技術者っぽい!
何だかピーピー鳴っているサーボがあるので調べてくださいね。
以上でサーボモータの原点調整まで終わりです。
はぁ~まさか必要なドライバが家になかったとは…。
Robovie-nanoが届くまでの時間に用意しておけば良かったです。
そして実際の組み立てに入るまでの工程が多かった~
取扱説明書は公式のWebページでダウンロードできますし、
YouTubeにも動画がありますし、完全な準備不足ですね。
ちょっと長くなってしまったので今回はここまでにしましょう。
まとめ:文系出身でも二足歩行ロボットは組み立てられそう!
以上で【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【組立編?】の説明は終わりです。
お疲れ様でした。
バッテリーに関しては取扱説明書の記載など一切ないので手探りで進めていく必要があります。
きっとベテランの方には常識レベルなんでしょうね。
引き続きRobovie-nanoのプレーンな状態の組み立て、調整やオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。


コメント