今回も二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
Robovie-nano(ロボビーナノ)部品の組み立て
組み立て工程
組み立て前の準備までは前回の記事を見ていただければと思います。
【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【組立編?】
ヴイストン株式会社さんのYouTube動画でどんな感じか確認して進めると分かりやすいです。
脚部の組み立て
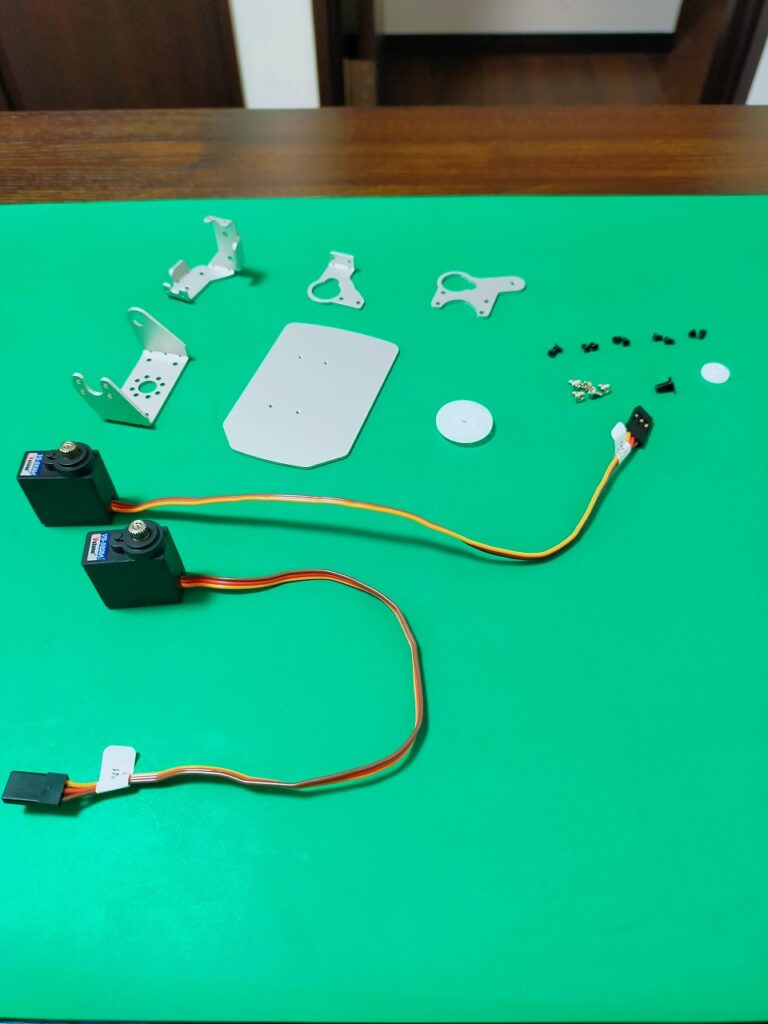
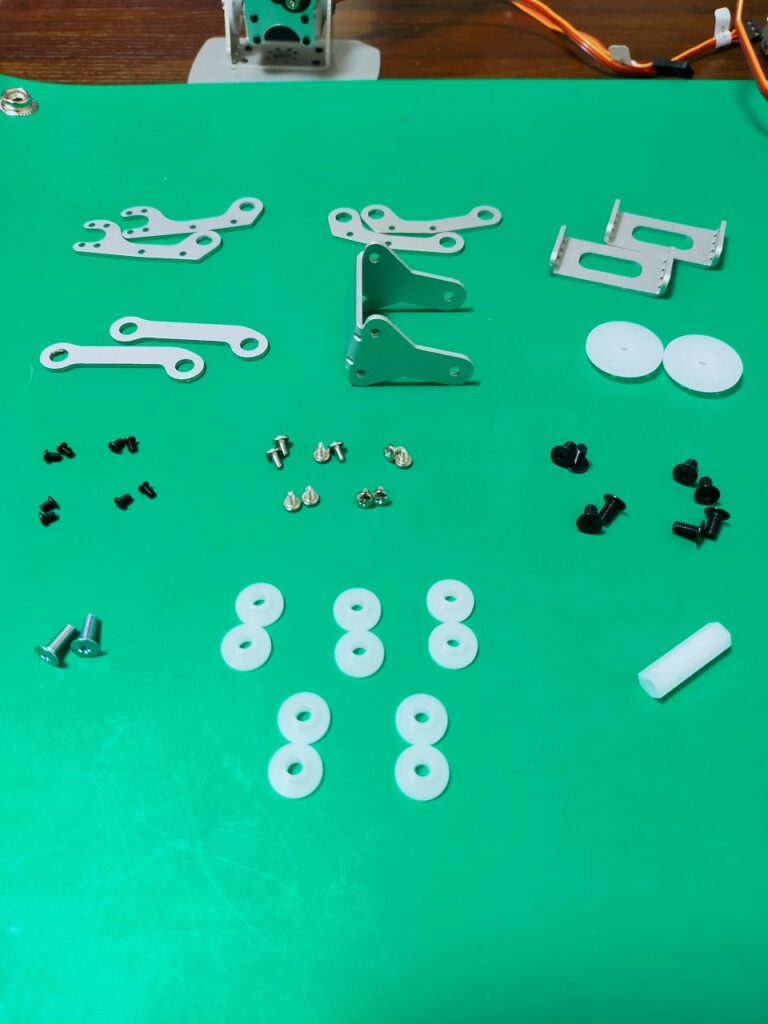
取扱説明書の“必要なパーツを準備してください。”に載っている部品を準備します。
まずは右足首部分の部品からです。
次は右大腿部分の部品です。
右足首より部品の数が少ないし楽勝です!
組み合わせてネジで止めるだけなので簡単です。

次は右リンクアーム部分の部品で数が多いです。
足の部品なのにリンクアームなのか!
リンク機構の部品の一部の名称ですね。
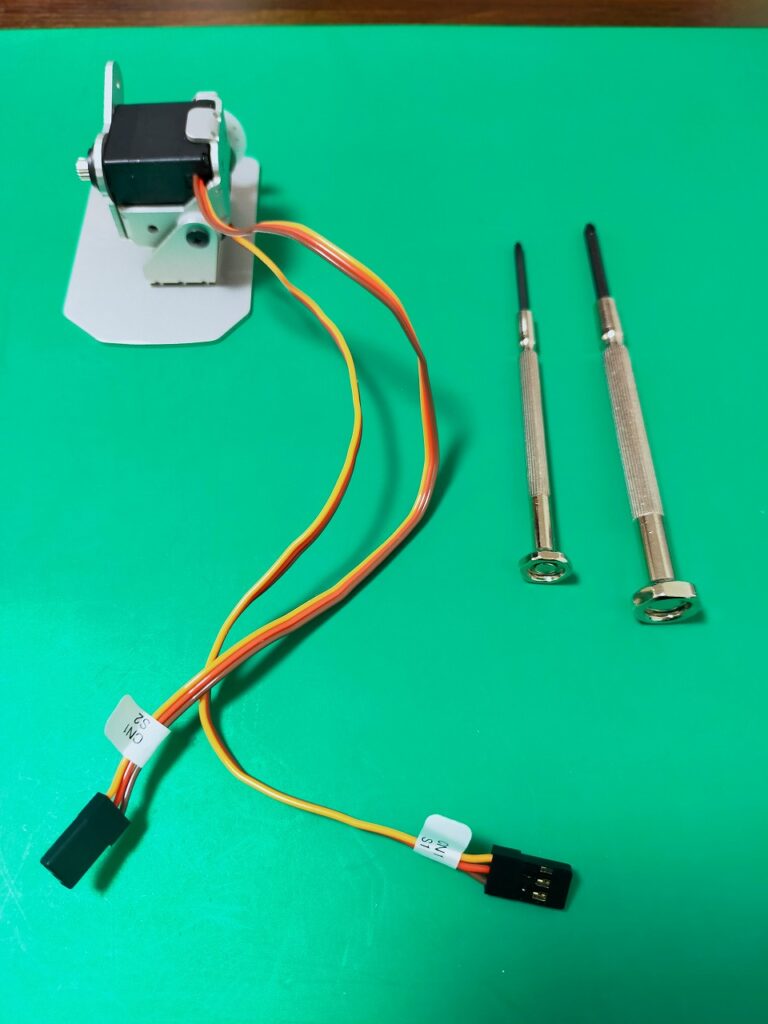
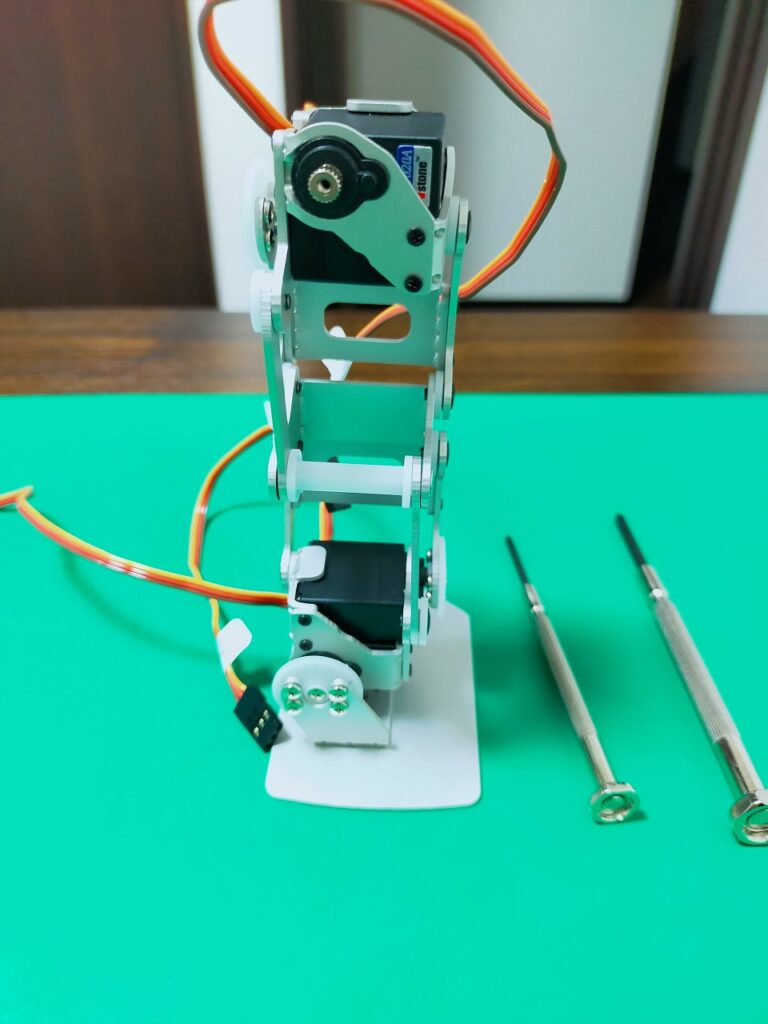
リンクアームの組み立てと取り付けをするとこんな感じで右脚の完成です。

おぉっ!足になったー!!実物は結構デカいっす!
後ろから見るとこんな感じです。
 後部リンクの取り付けでスペーサとブッシュが取扱説明書のようにできず、ちょっとつまりました。
後部リンクの取り付けでスペーサとブッシュが取扱説明書のようにできず、ちょっとつまりました。
YouTubeの公式動画の通りに作成したところ、ちゃんと組むことができて助かりました。
左足もサクッと作っちゃいます!
右足ができれば同じように組むだけなので簡単ですね。
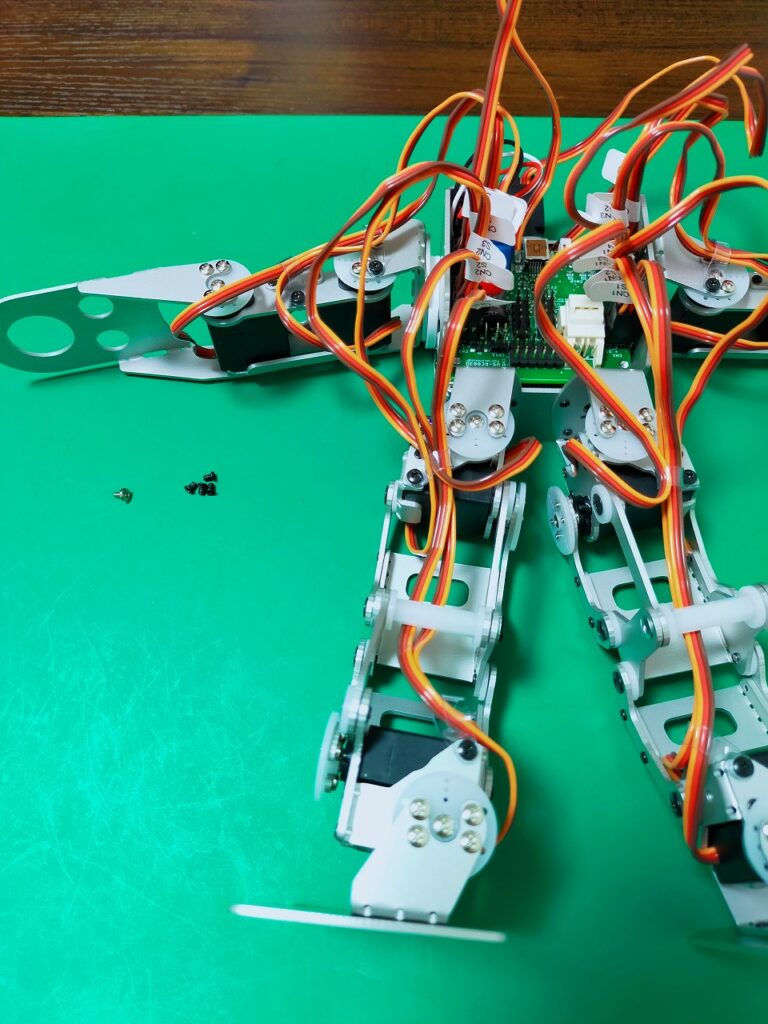
左右の脚部を並べるとこんな感じです。

腕部の組み立て
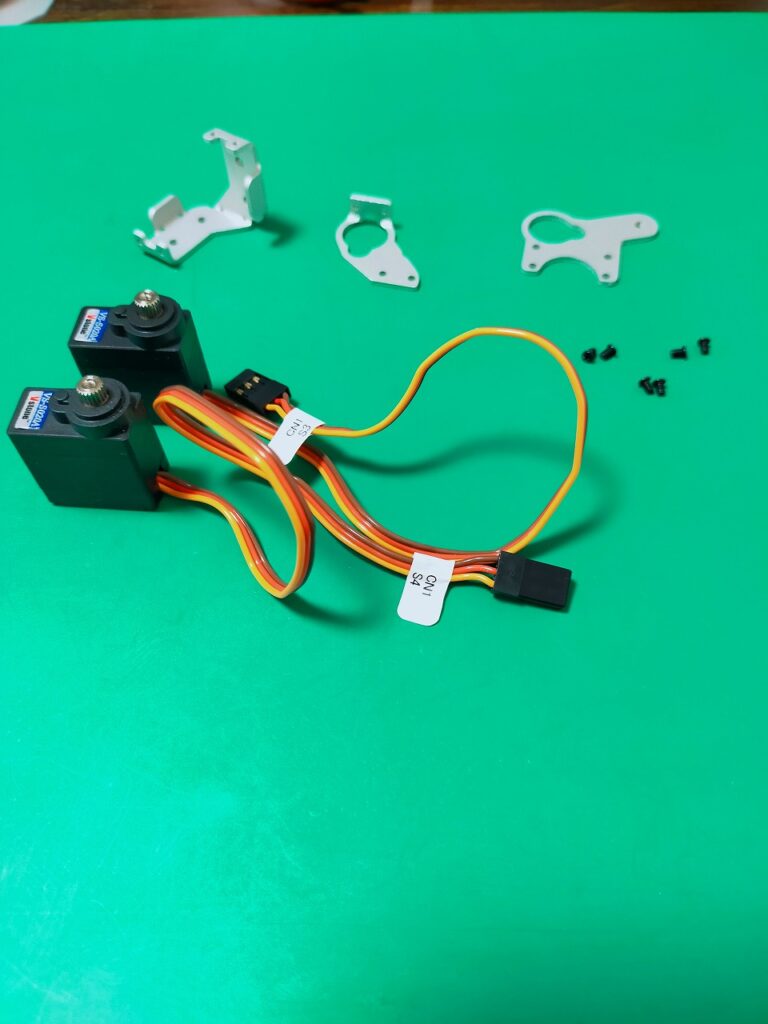
取扱説明書の“必要なパーツを準備してください。”に載っている部品を準備します。
まずは右腕部分の部品からです。
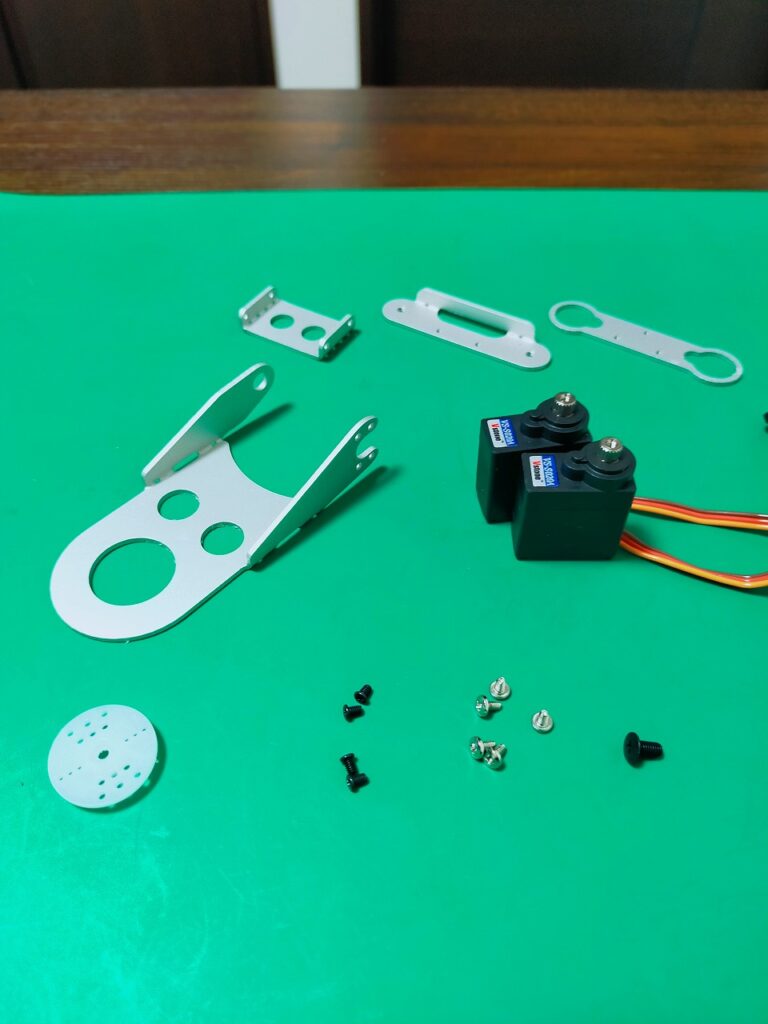
脚部のリンクアーム部分を終わらせているので少なく見えますね!
右腕部分が完成するとこんな感じです。

顔みたいです。
左腕も同様に組み立てましょう。
左右の腕部を並べるとこんな感じです。

胴体の組み立て
取扱説明書の“必要なパーツを準備してください。”に載っている部品を準備します。
今回はヨー軸拡張セットを使わないので以下のパーツのみです。
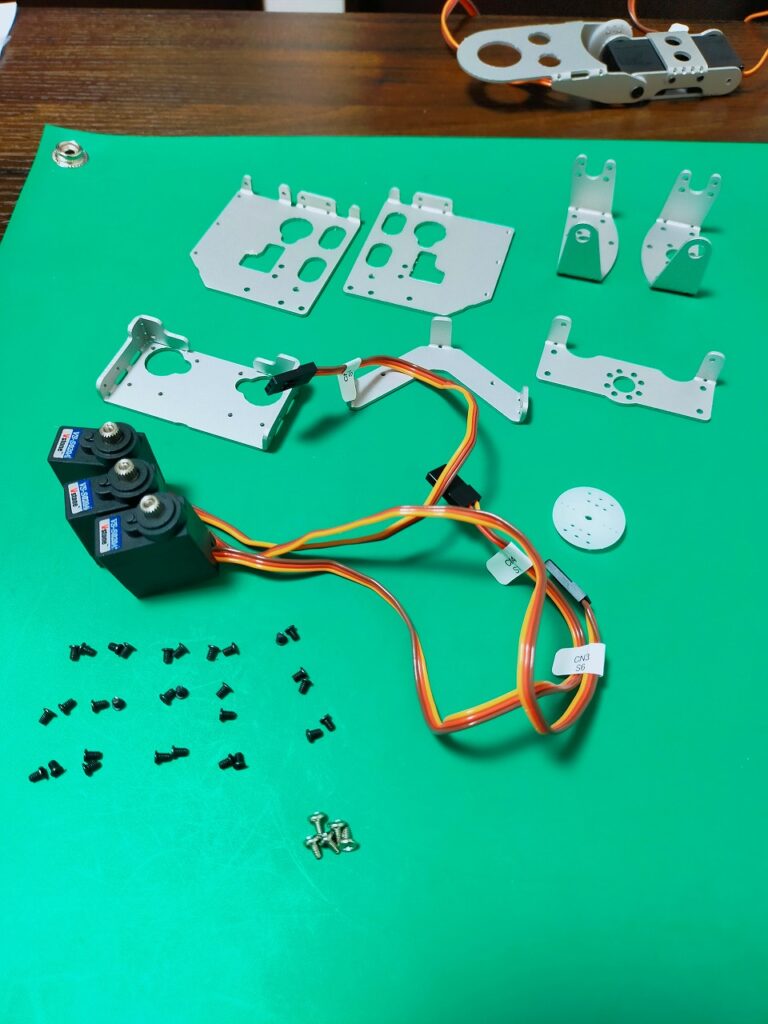
ネジの数は多いけど、脚部の組み立てに比べれば簡単そうですね!
胴体部分を一通り組み立てるとこんな感じです。
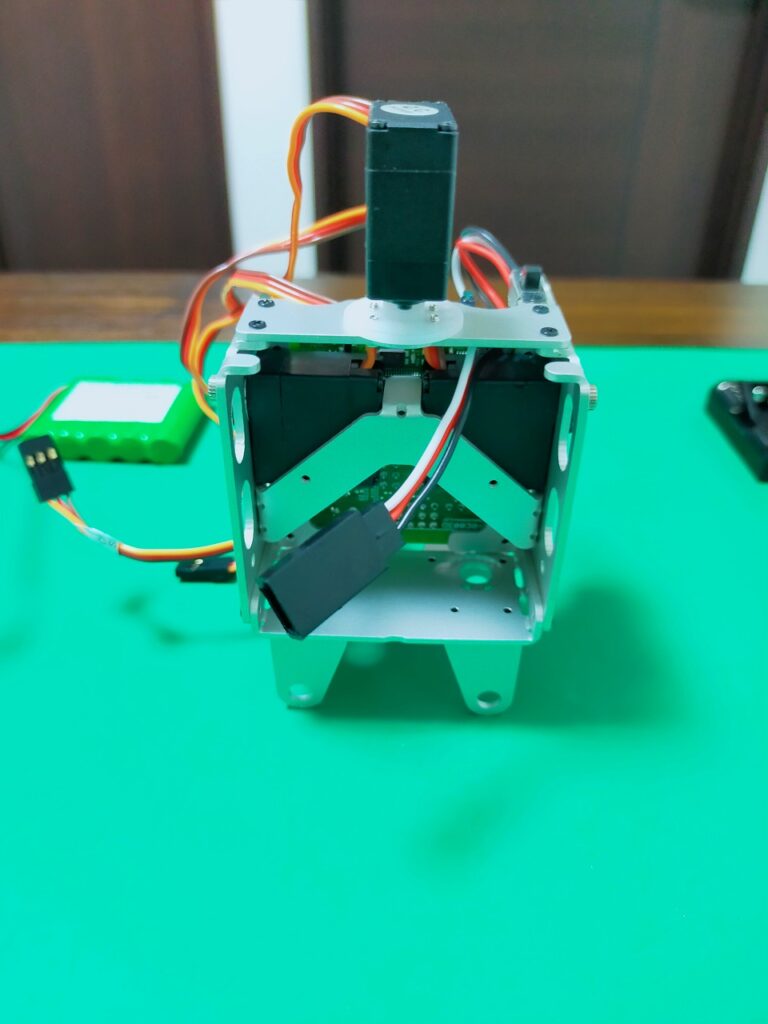
おぉっ!なんかロボットって感じがする!
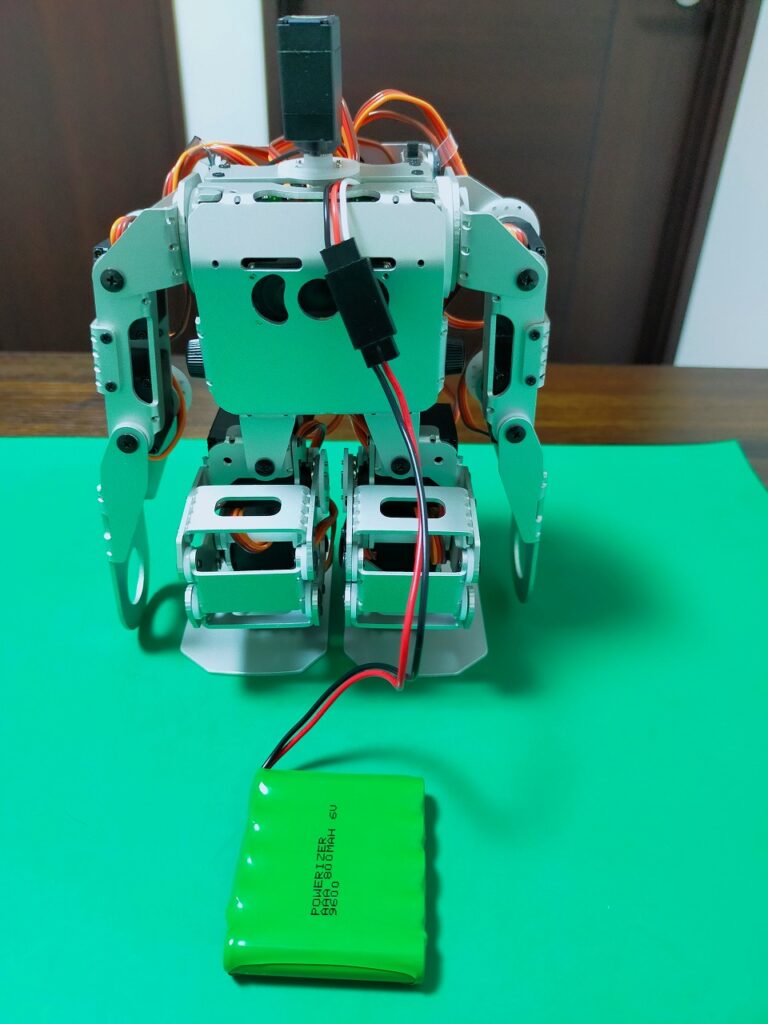
取説ではこの段階で電池ボックスも取り付けますがバッテリーを買っているので取り付けていません。
後ろから見るとこんな感じです。
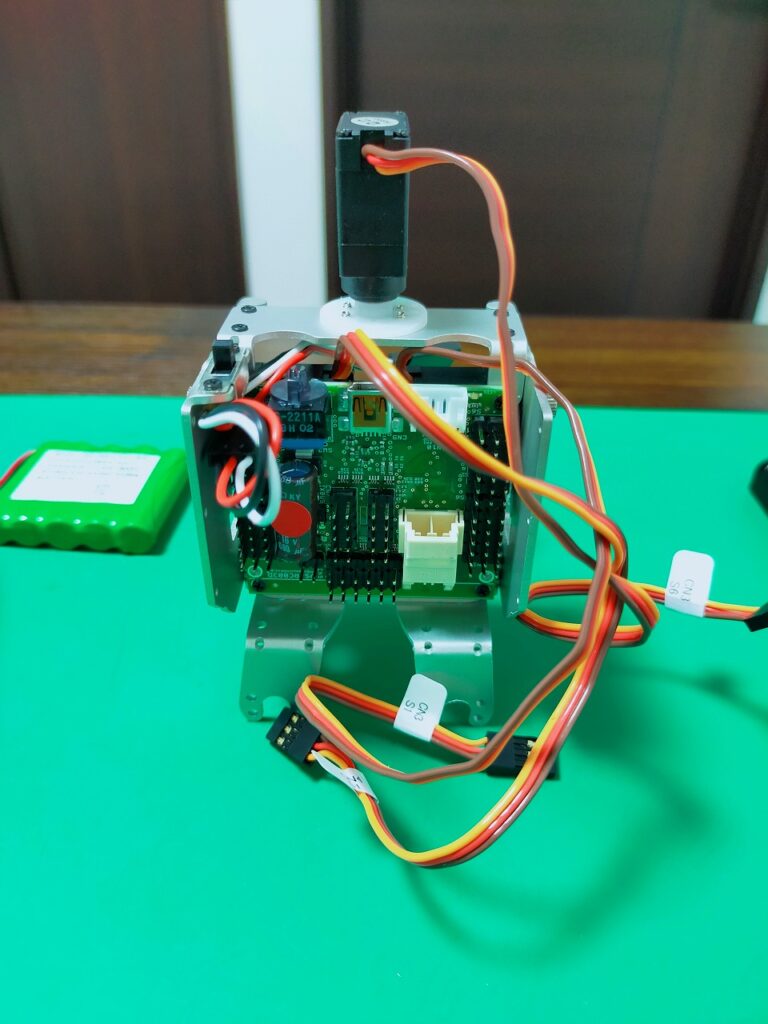
このサイズでチョコチョコ動くロボットでも面白そう!
ちなみに胴体の組み立てでは公式の取扱説明書に記載のブレがありました。
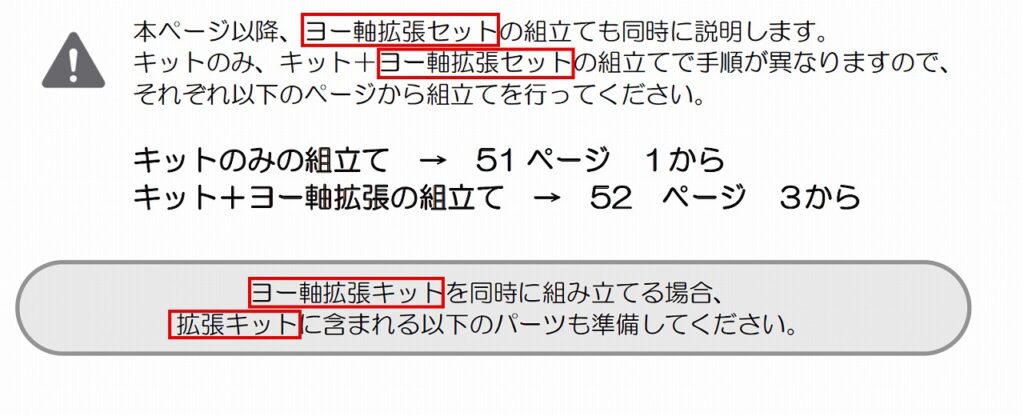
【出典:Robovie-nano取扱説明書(ver1.04)51ページ目】
意味は通じるから問題ないけど拡張キットになってますね!
セットでもキットでも分かるから問題なしですね。
そもそも商品のパッケージではYAW軸セットだからヨー軸拡張セットも統一されていません。
さらに公式Webページでも脚YAW軸セットという記載があったりします。
分かるから良いんです!
Robovie-nano(ロボビーナノ)本体の組み立て
脚部の取り付け
取扱説明書の“必要なパーツを準備してください。”に載っている部品を準備します。

脚部と腕部の取り付けに使う部品です。
「ネジNC M2-4 Sタイト」が30個必要なのですが、私のには29個しかありませんでした。
昭和生まれなものでネジ類は多めに入っている認識だったので焦りました。
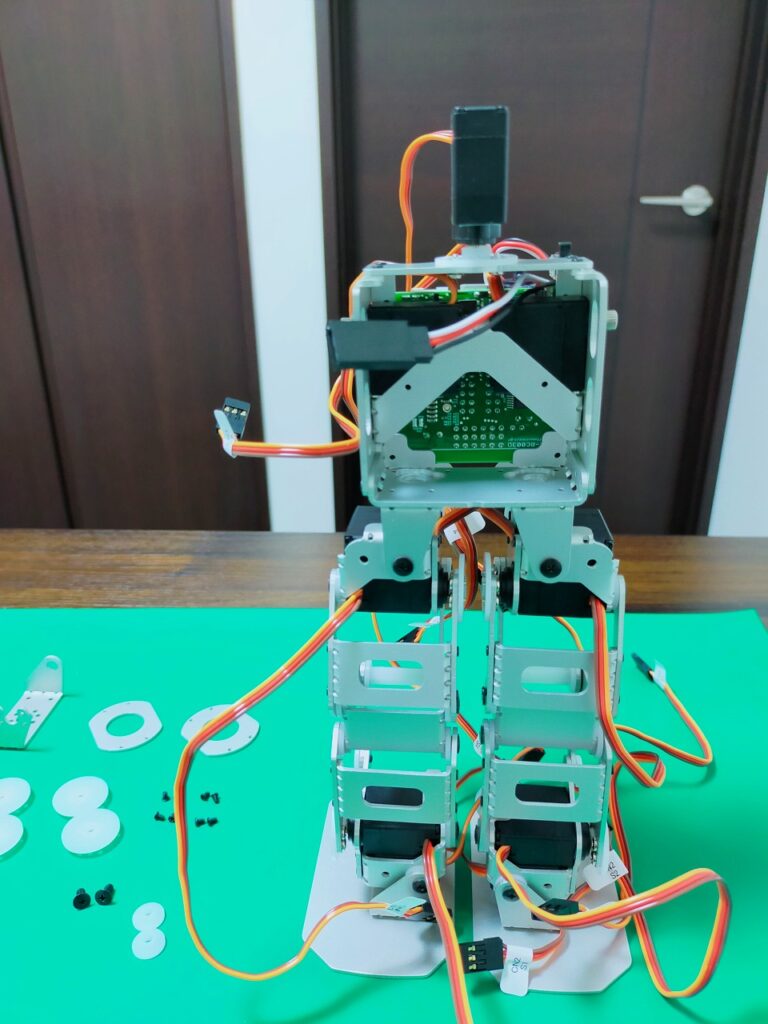
おぉっ!もうカッコいい!
この段階では調整とかないので脚部に胴体を乗っけてネジでとめるだけです。
腕部の取り付け
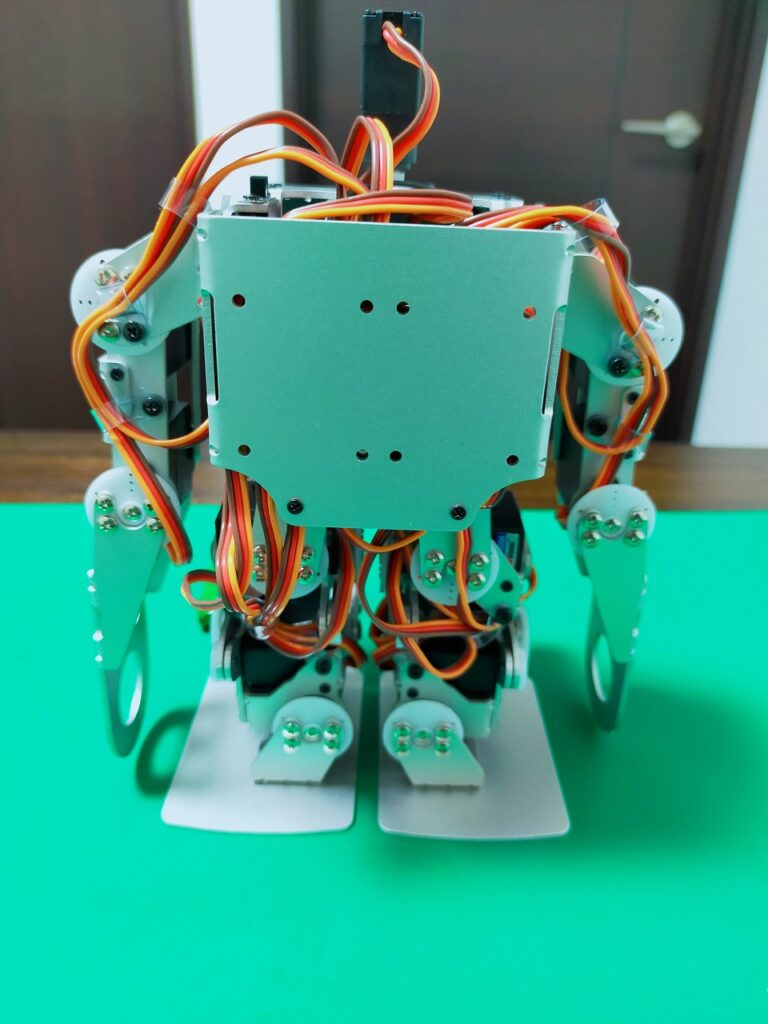
胴体に腕部を取り付けるとこんな感じです。
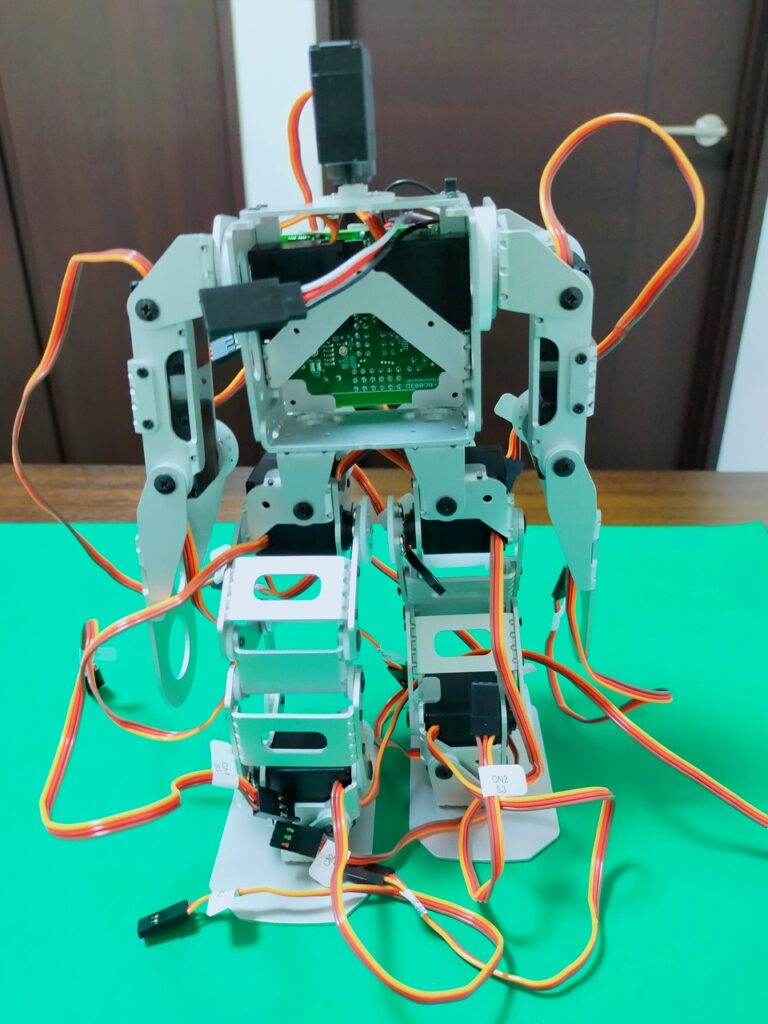
フォーッ!ロボットできた!!
完成まではまだ行程がありますよ。
ここまでで本体作成の8割は終わったと言えます。
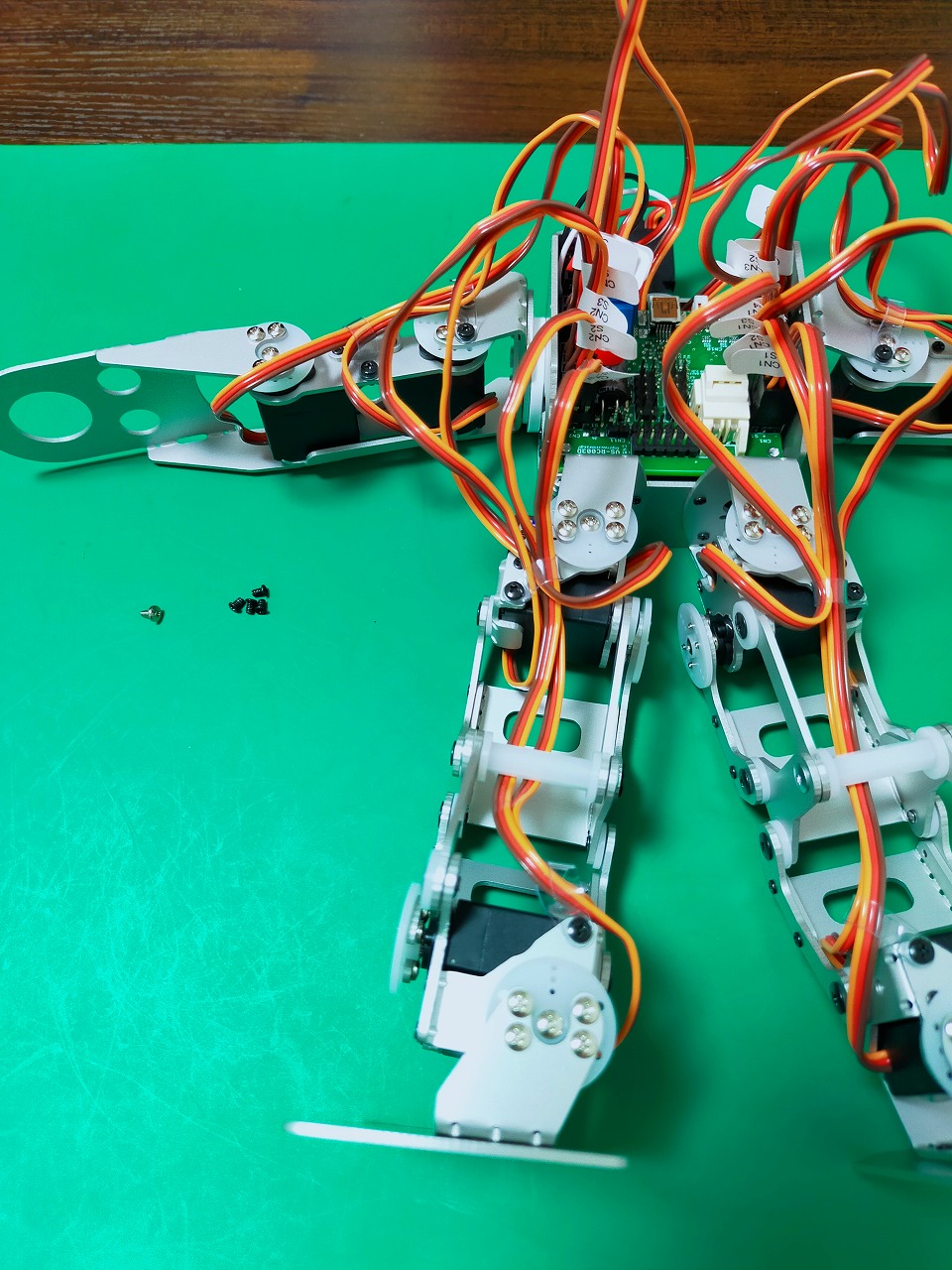
配線のまとめと接続
透明な結束バンドと黒いネジで配線をまとめます。
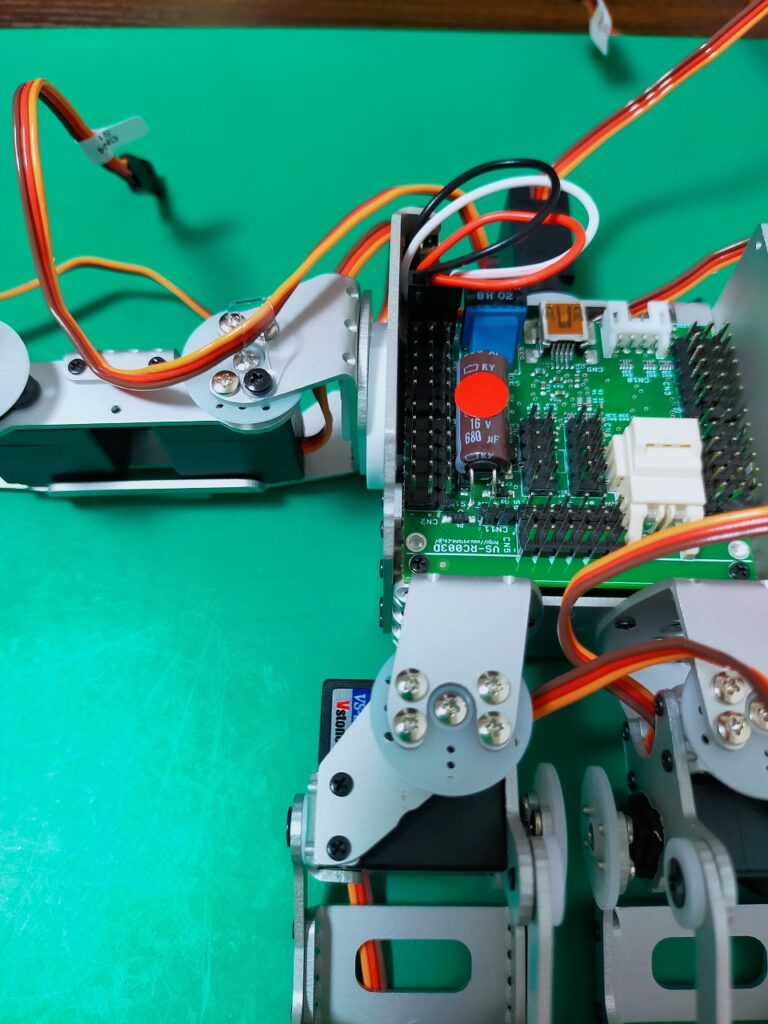
腕部をとめている右下の黒いネジが配線のまとめの際に付け替えたものです。
ネジを締めすぎて結束バンドがぐにゃっとなったので緩めました!
すべての配線をまとめてCPUボードに接続した後はこんな感じです。
本体の左にあるネジは配線まとめ時の付け替えて不要となったネジです。
前後カバーの取り付け
取扱説明書の”必要なパーツを準備してください。“に載っている部品を準備します。

いよいよ大詰めって感じですね!
ここまで来れば何も問題はないはずです。
前後カバーを取る付けるとこんな感じです。
公式のYouTubeでよく出てくるお座りポーズをしています。
安定感抜群!
なお、バッテリーだと前カバーに収まりません。
横から締めるユリヤネジがバッテリーに当たって最後まで締まらないのです。
本体完成後に余ったパーツです。
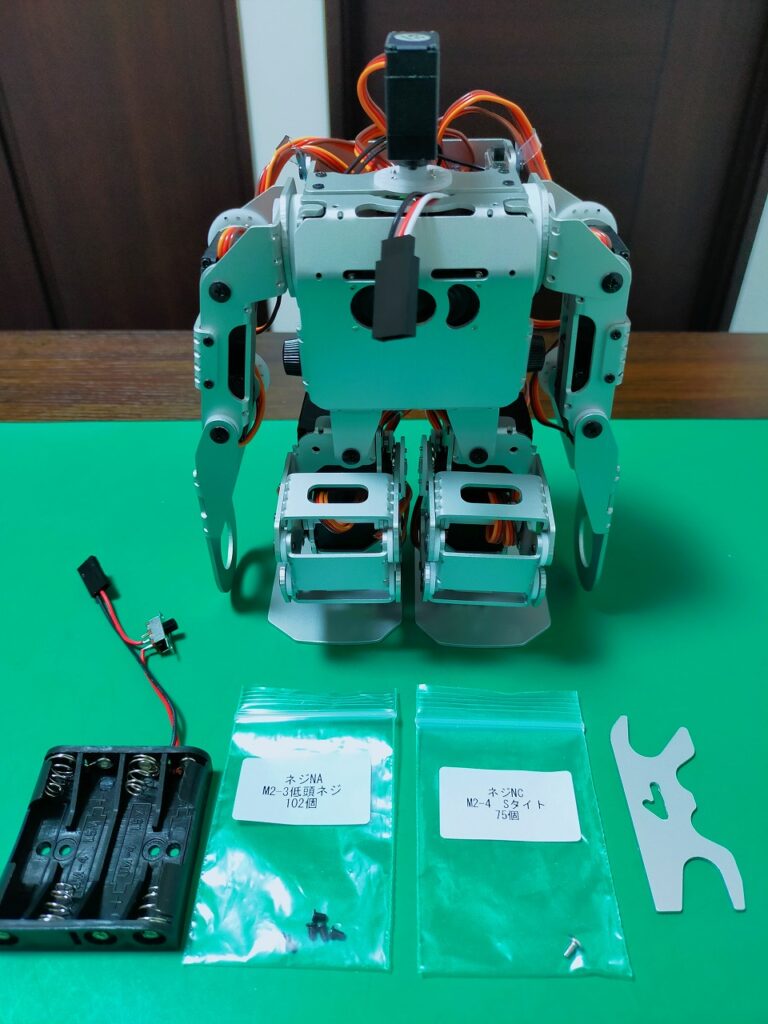
電池ボックス、ネジ2種類と初期位置調整用ジグが余りました。
初期位置調整用ジグは次回活躍しますが他は出番なしです。
はぁ~やっと自分のRobovie-nanoができました!
バッテリーが収まらない問題で完成後の感動が薄れてしまったけれど…
ひとまず達成感があります。
思っていたよりRobovie-nano大きかった~
最初は電池ボックスから始めた方が良かったかもしれませんね。
まぁ、完成おめでとうございます。
それでは今回はここまでにしましょう。
まとめ:文系出身でも二足歩行ロボットは組み立てられる!
以上で【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【組立編】の説明は終わりです。
お疲れ様でした。
前後カバーの下はケーブルでキツキツなので若干不安はありますが進めていきます。
二足歩行ロボットを作ることができたー!という感動をぜひ体験してもらいたいです。
引き続きRobovie-nanoのプレーンな状態の組み立て、調整やオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。


コメント