今回も二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
ジャイロ・加速度センサ拡張セットの追加
ジャイロ・加速度センサの追加(ジャイロ・加速度センサ拡張セット)
YAW軸セットのパッケージはこんな感じです。
ヴイストン株式会社さんの公式Webページから取扱説明書のpdfファイルがダウンロードできます。

ちなみに2023年1月3日の段階ではVS-IX001取り付け説明書は1.00版でした。
ジャイロ・加速度センサ拡張セットのパッケージはこんな感じです。

開封するとこんな感じです。

取り付け用フレームへのVS-IX012取り付け
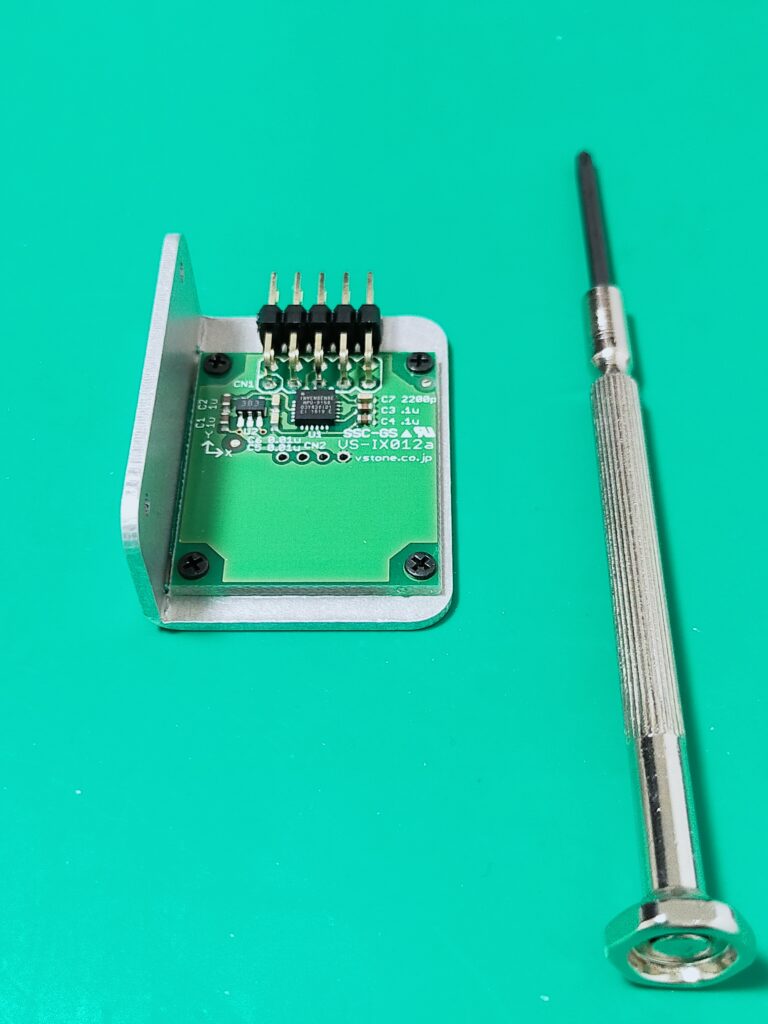
ジャイロ・加速度センサ拡張セットに入っている取り付け用フレームにVS-IX012を付けます。
四隅をネジでとめるだけなので楽勝です!
VS-IX012を取り付け用フレームに付けるととこんな感じです。
背面カバーへの取り付け
VS-IX012と取り付け用フレームを取り付けるために本体の背面カバーを外します。
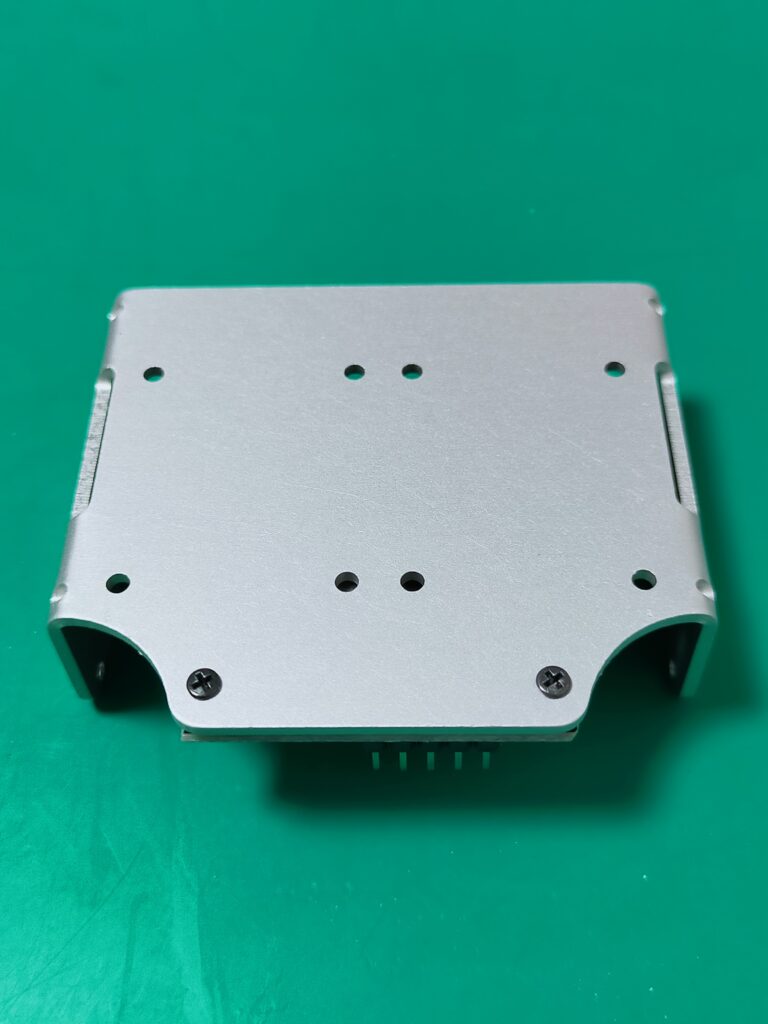
受信モジュールをとめている背面カバー下部のネジ2個を外し、セット付属の長いネジ(M2-8)にてVS-IX012と取り付け用フレームを取り付けます。
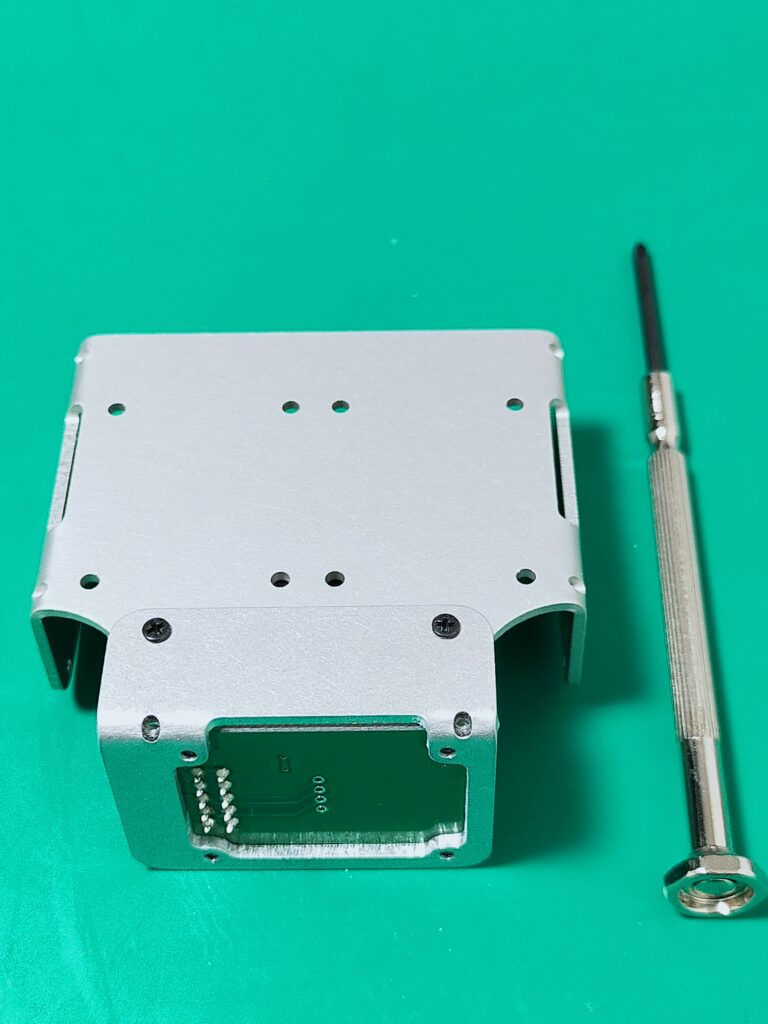
絶縁処理
フレームから見えているVS-IX012を隠すようにセット付属のゴムシートを貼り付けます。

ゴムシートに両面テープが付いていたので楽勝でした!
CPUボードへの接続
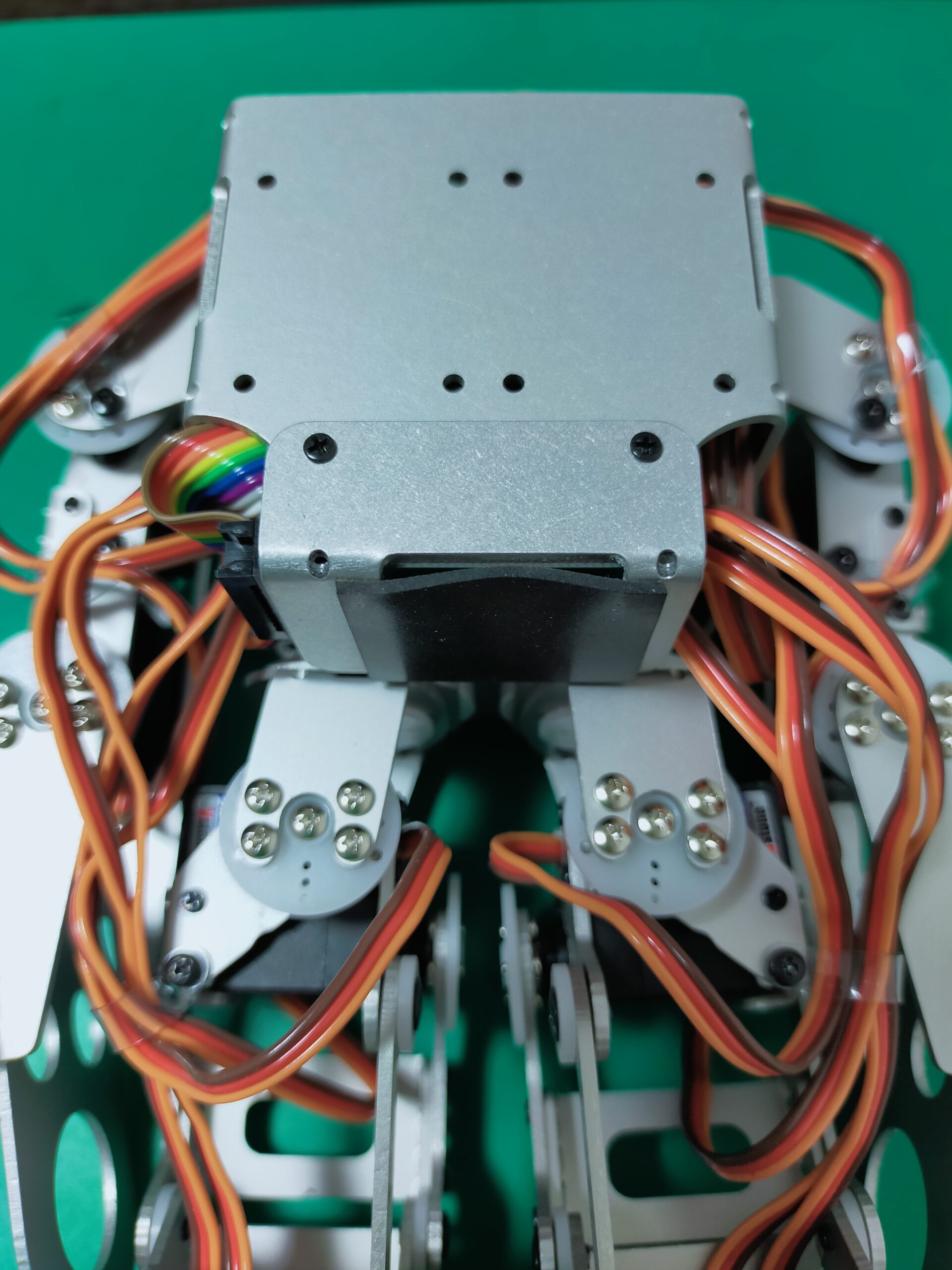
取扱説明書の通り、CPUボードとVS-IX012をフラットケーブルで接続します。
今回はフラットケーブルの▲印を発見できました。

オレンジ色の線の上にうっすらと▲があります。
背面カバーの取り付け
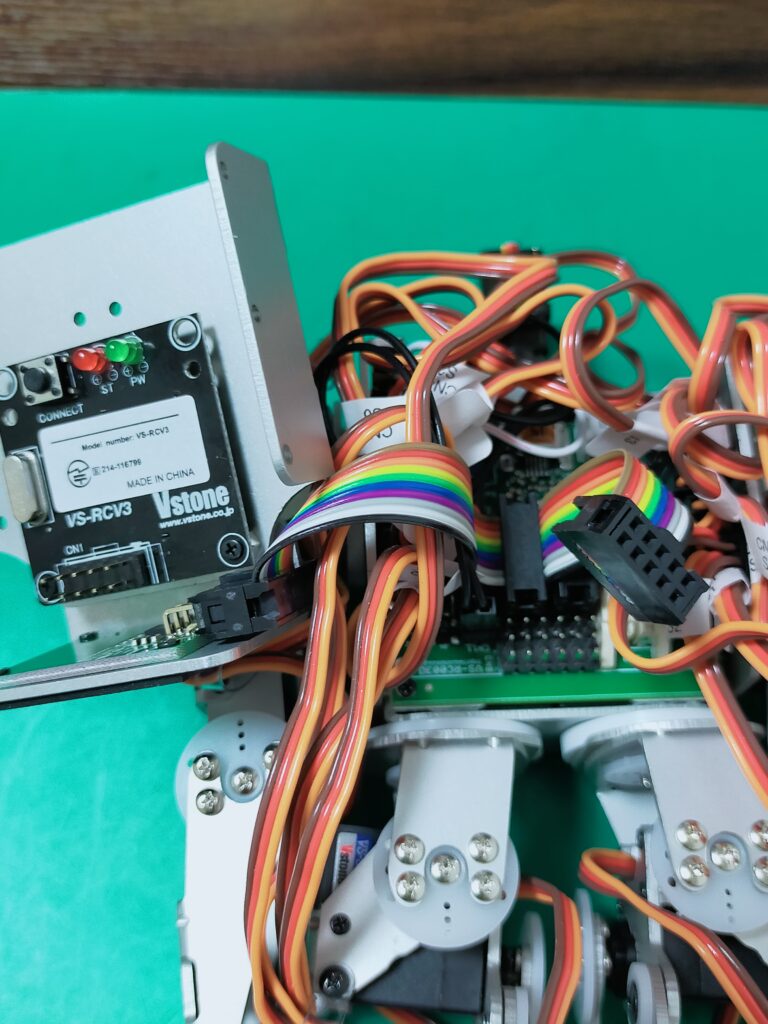
背面カバーについている受信モジュールとVS-IX012をそれぞれCPUボードに接続し、背面カバーを本体に取り付けます。
バックパック?ランドセル?への追加装備って良いですね。
別角度から見るとこんな感じです。
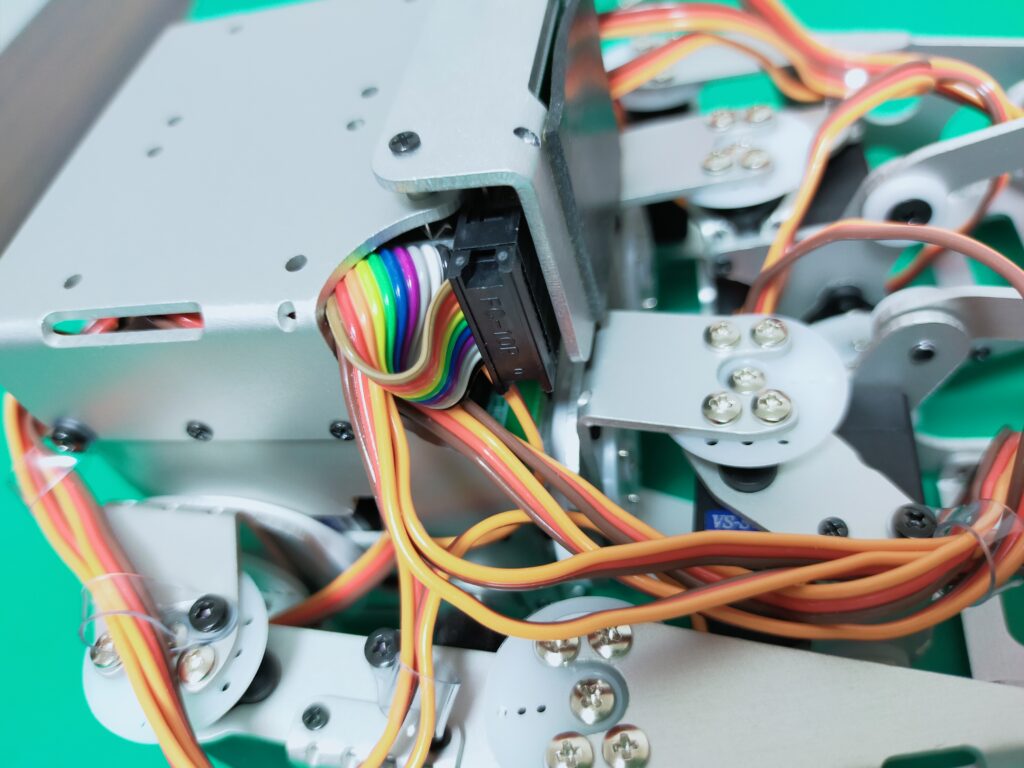
実際は先に背面カバーを付けてからCPUボードに接続済みのフラットケーブルをVS-IX012につなぎました。
VS-IX012の認識確認
ロボット本体のスイッチがOFFなのを確認し、PC⇔CPUボード⇔バッテリーを接続します。
基本的には取扱説明書にある「3.設定の確認」の通りにRobovieMaker2を操作するのみです。
RobovieMaker2を起動後に通信ボタンをクリックします。
ツールバーの プロジェクトの設定 > CPUの設定 からCPUの設定ダイアログを表示します。
[拡張機器]タブを選択するとVS-IX012を認識していることが確認できます。
正常に認識し動作していることが確認できました!
目視での設定調整は不要のようですね。
Robovie-nanoの場合はモードスイッチの切り替えだけで済むようです。
取扱説明書にも記載がありました。
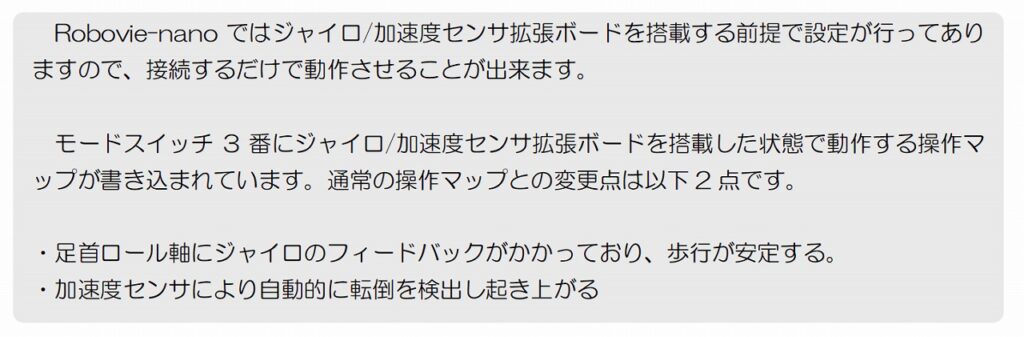
【出典:Robovie-nano VS-IX001取り付け説明書(ver.1.00)9ページ目】
Robovie-nano(ロボビーナノ)の操作
モードスイッチの切り替え
ロボット本体のモードスイッチを「3」に切り替えます。
前回の記事での疑問について、実際に動かしたところ明らかになりました。
【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【YAW軸拡張編】
ヨー軸がないものとして動作するため、YAW軸を拡張している場合は起き上がれません。
また、旋回する際もノーマル状態の激しい旋回となります。
せっかくオプションパーツを取り付けたのに、良いとこ取りができないなんて…。
RobovieMaker2のモーション作成をすることで解決できそうですね。
ヨー軸拡張状態をベースにしてモーションデータにジャイロセンサを効かせるものをRobovieMaker2で作成すれば良さそうです。
モード2とモード3のモーションの内容理解から始める必要があります。
実際の動きについて
動作の変化については実際に見るのが一番ということで今回も動画にしてみました。
起き上がりに失敗する自動起き上がりの無限ループも入っています。
前進・後進で転倒しにくくなりました!
ジャイロ・加速度センサを付けたことで動きが慎重になりましたね。
動画の後半はマップ切り替えで標準動作からバトル動作へと切り替えた際の動きもあります。
はぁ~ジャイロ・加速度センサを付けるだけで動作が安定するのは凄い!
ただ、せっかく追加したYAW軸と連携できないのはガッカリしました…。
ハンドユニットを付けた際にはモーション作成が必要となります。
この機会にRobovieMaker2の使い方に慣れておくのも良いですね。
今回はここまでにしましょう。
まとめ:ジャイロ・加速度センサの追加は安定歩行に有効!
以上で【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【ジャイロ・加速度センサ拡張編】の説明は終わりです。
お疲れ様でした。
センサの追加によってバタンバタンと倒れていたRobovie-nanoが転倒しにくくなりました。
また、転倒した際にこちらから操作しなくても自動で起き上がり動作をするのには驚きました。
引き続きRobovie-nanoのオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。


コメント