今回も二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
YAW(ヨー)軸セットの追加
YAW軸の追加(YAW軸セット)
YAW軸セットのパッケージはこんな感じです。

開封するとこんな感じです。

サーボモータのナンバリング
YAW軸セットに入っているサーボモータ(※2個)のケーブルにナンバーシールを貼ります。
本体作成時に15個シール貼りをやっているので楽勝です!
ナンバーシールを貼るとこんな感じです。

サーボモータの取り付け
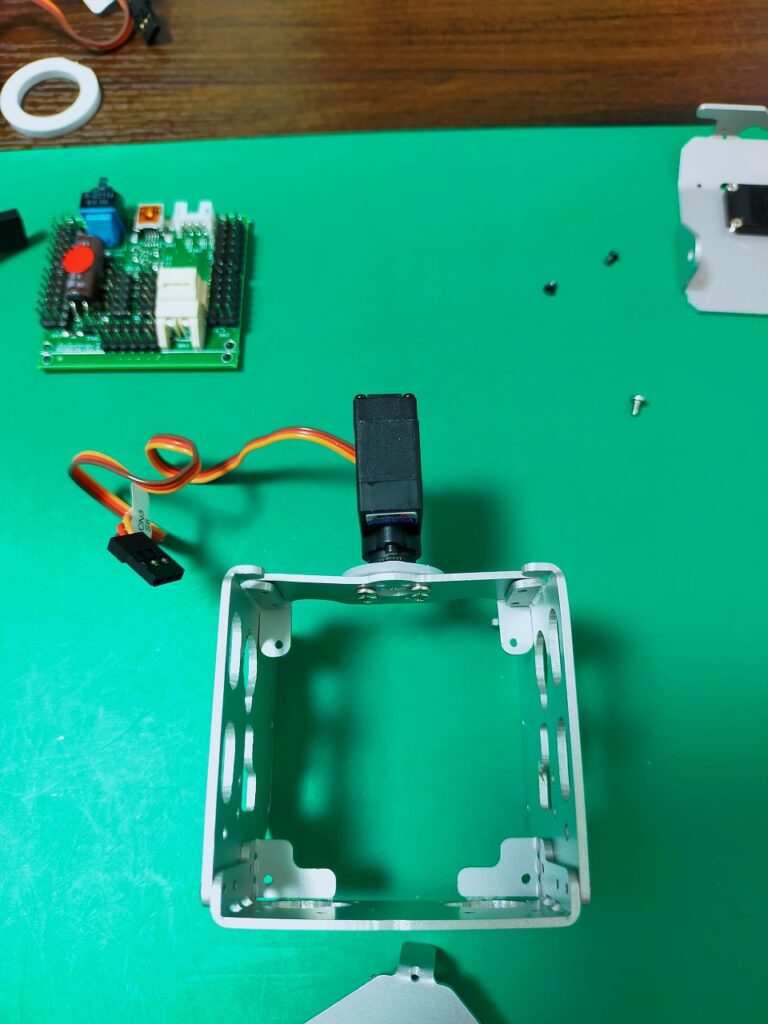
YAW軸セットのサーボモータを追加するために背面のカバーを外し、ケーブルを抜きます。
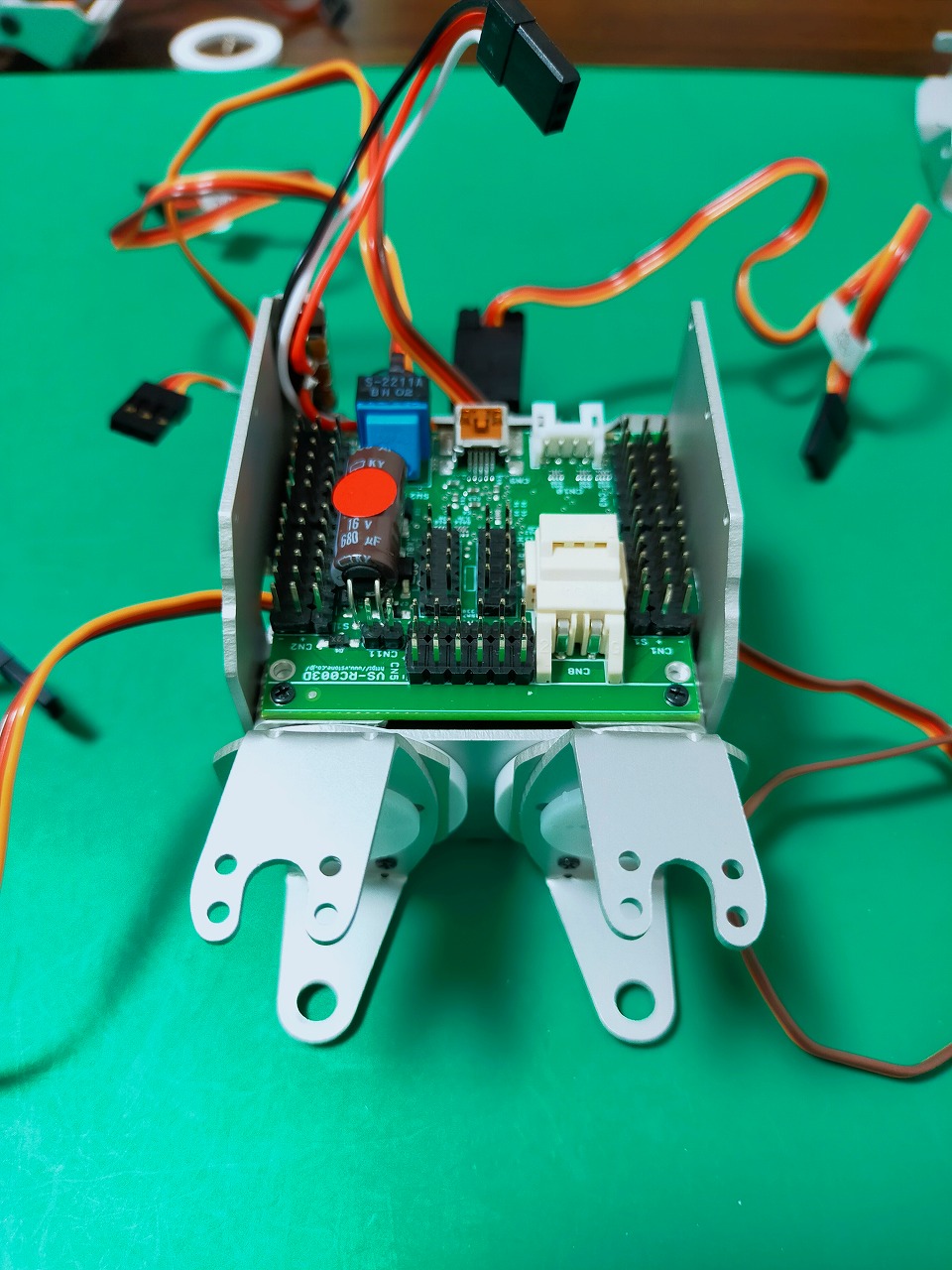
CPUボードを外します。
脚部を外します。
大腿ブラケットを外します。
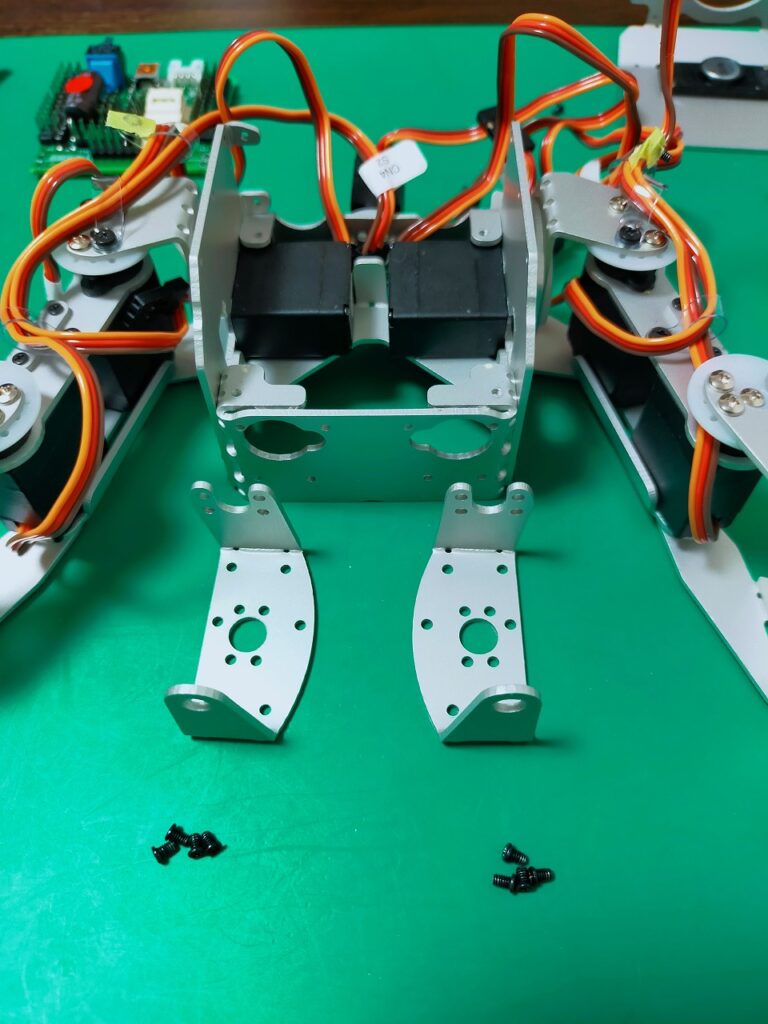
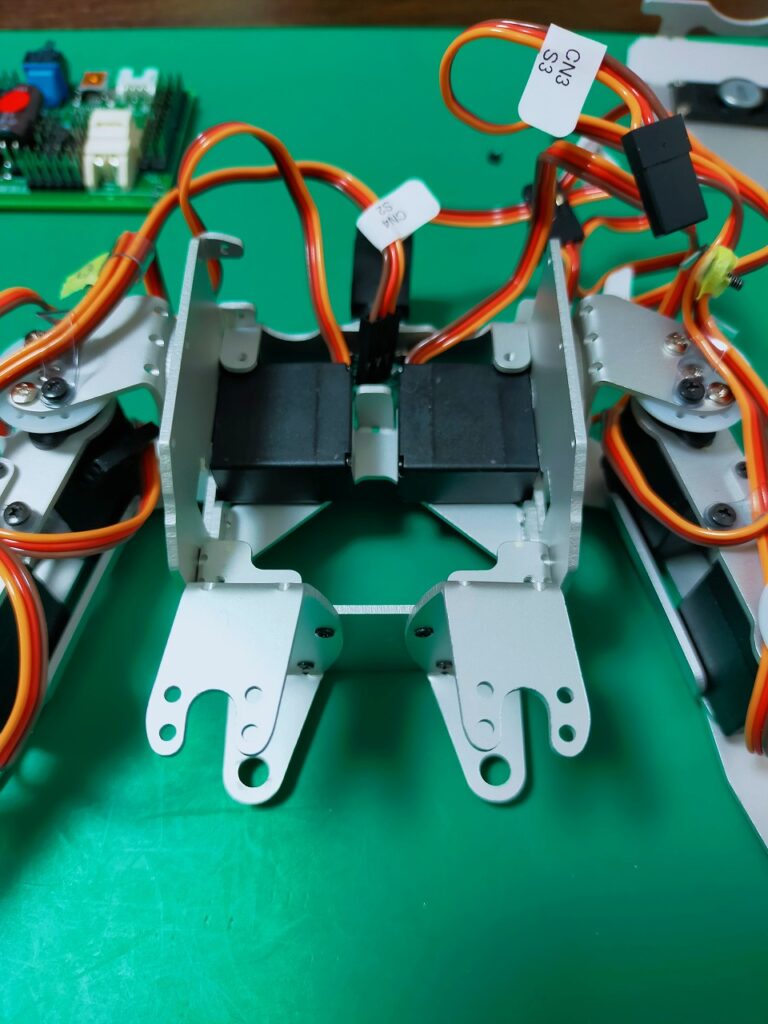
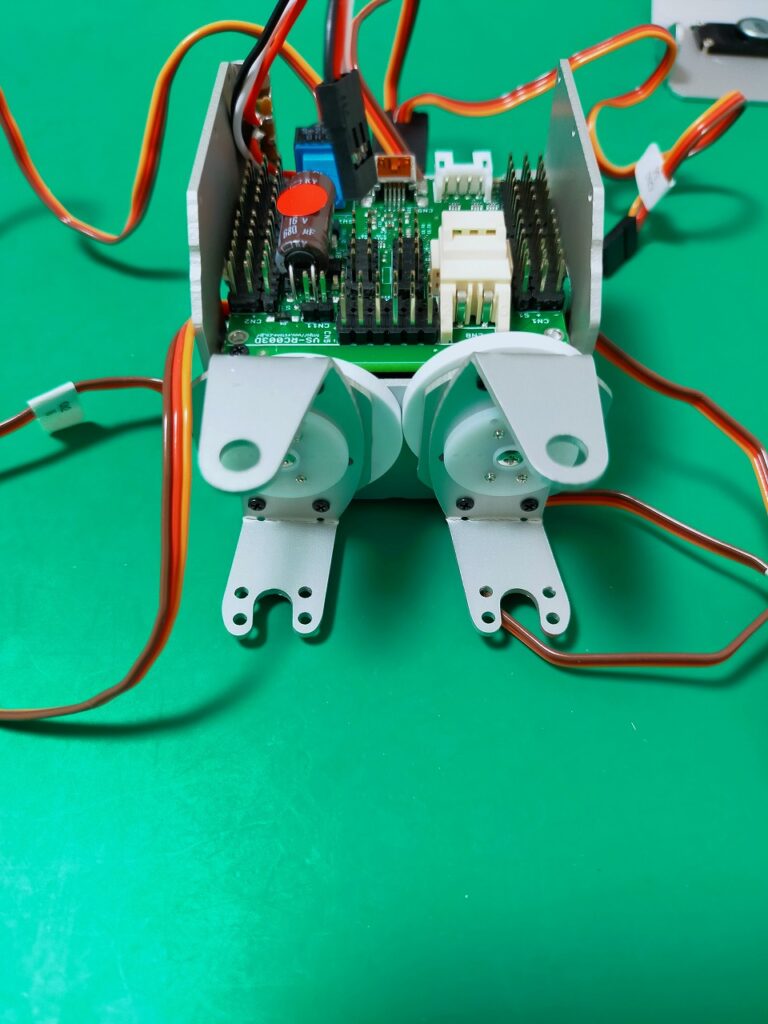
外したブラケットにYAW軸セットのサーボホーンとワッシャ押さえを取り付けます。
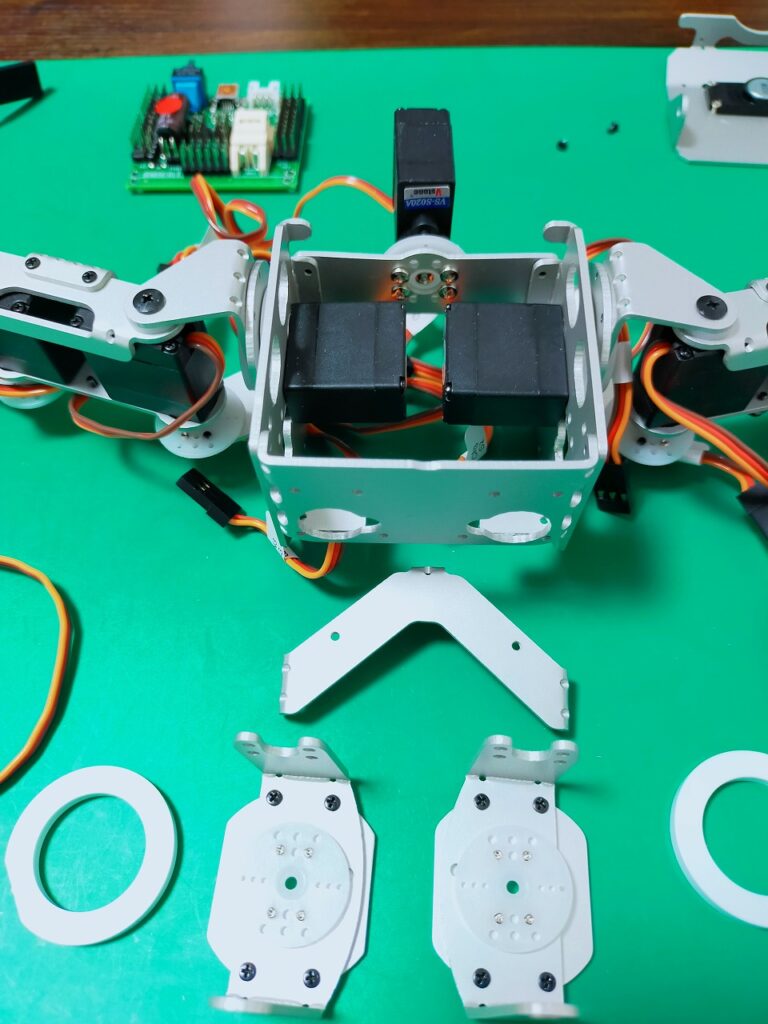
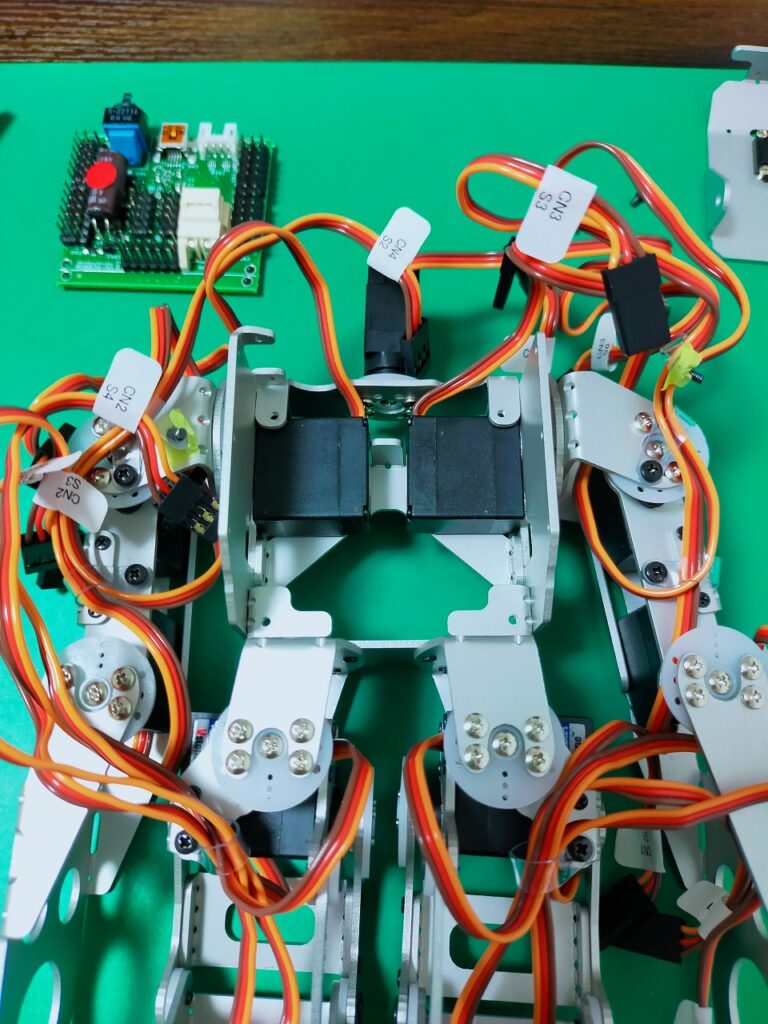
腰ヨー軸、腕ピッチ軸、大腿ブラケットを取り付けるとこんな感じです。
CPUボードを取り付けた後に気が付いたのですが、大腿ブラケットの左右が逆になっていました。
腕ピッチ軸を外した際に本体の表と裏が入れ替わっていたためです。
ちなみに大腿ブラケットだけ外せるため、付け替えは簡単でした。
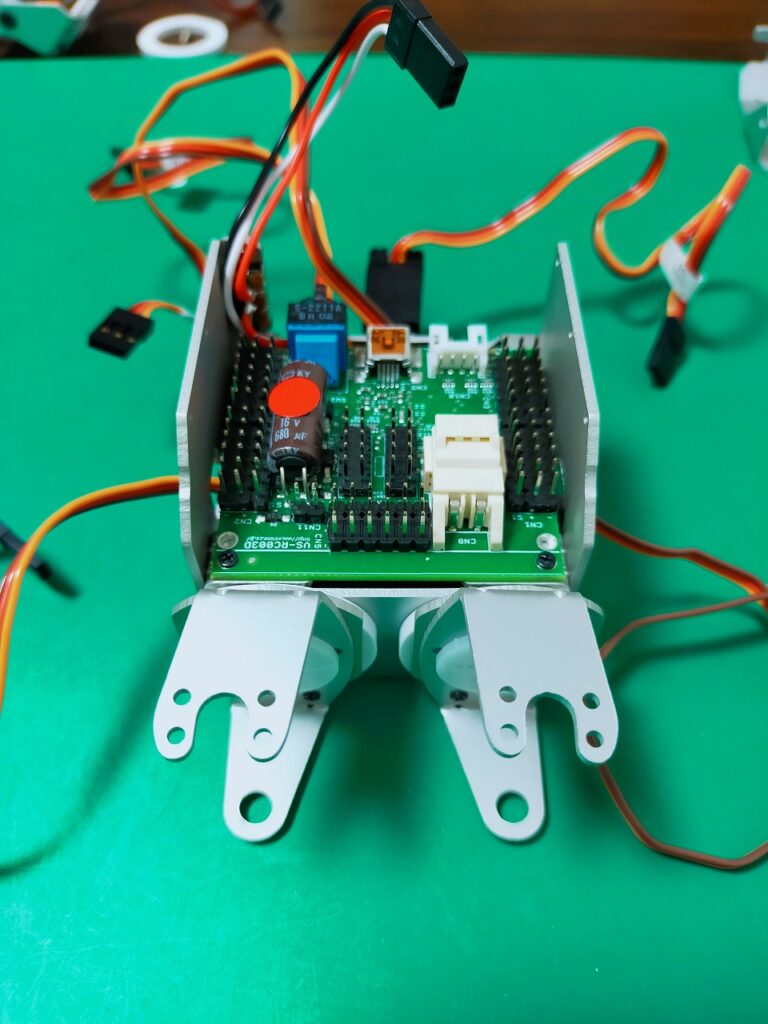
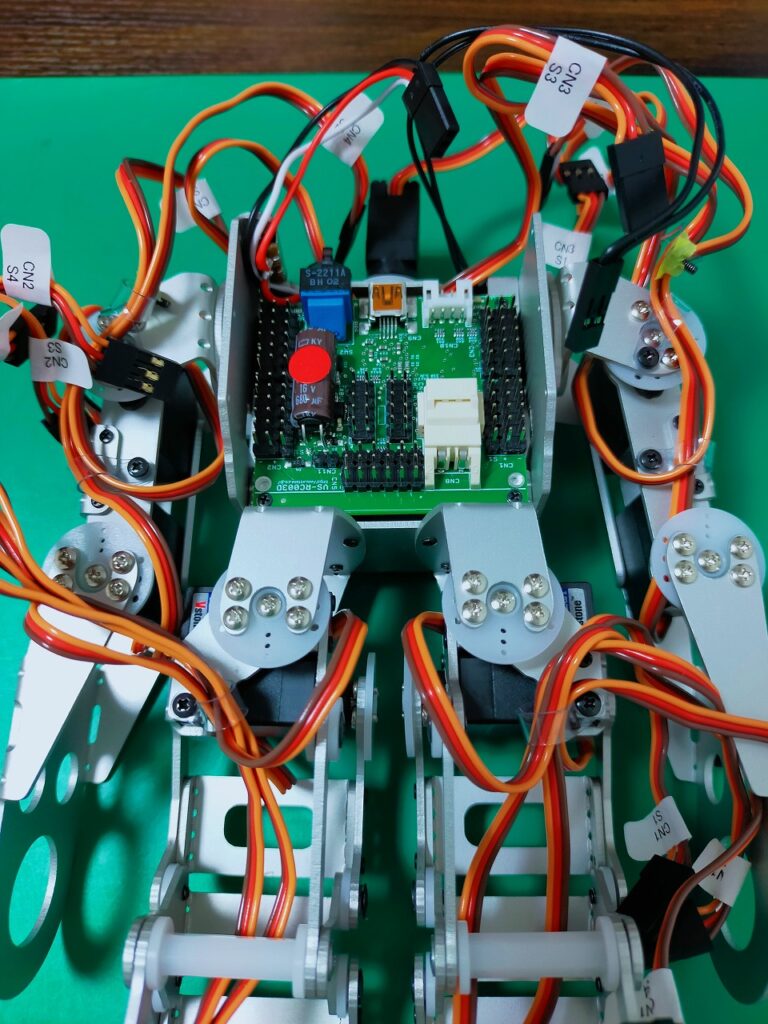
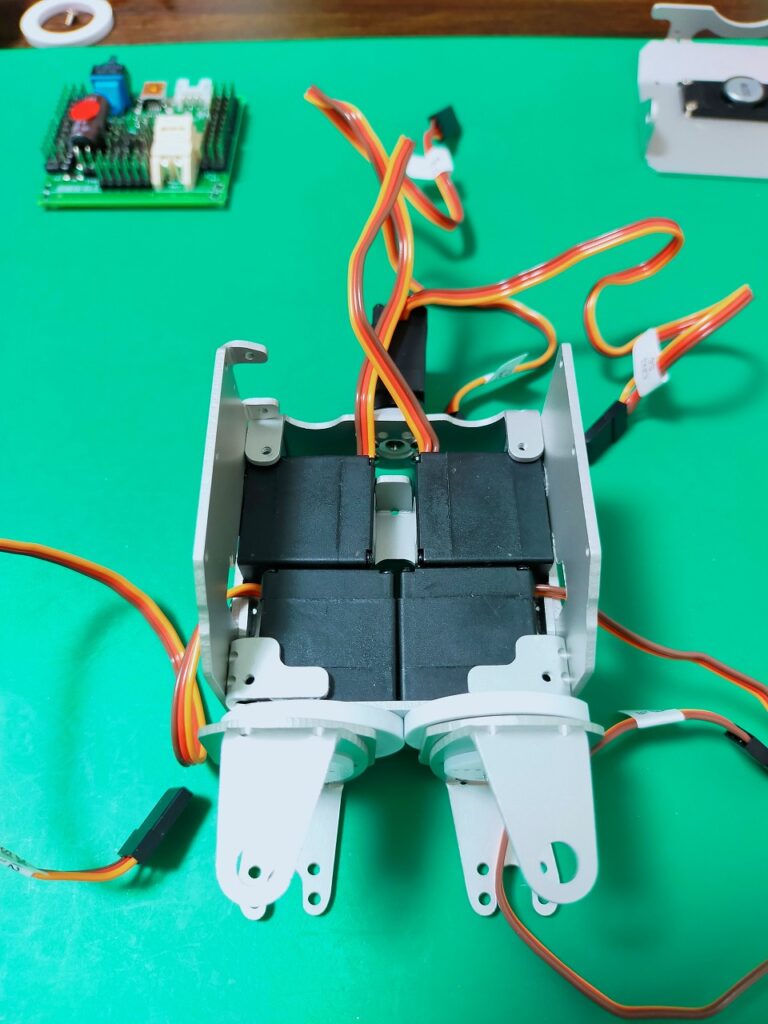
すべて組み立てると腰ヨー軸が追加されてこんな感じです。
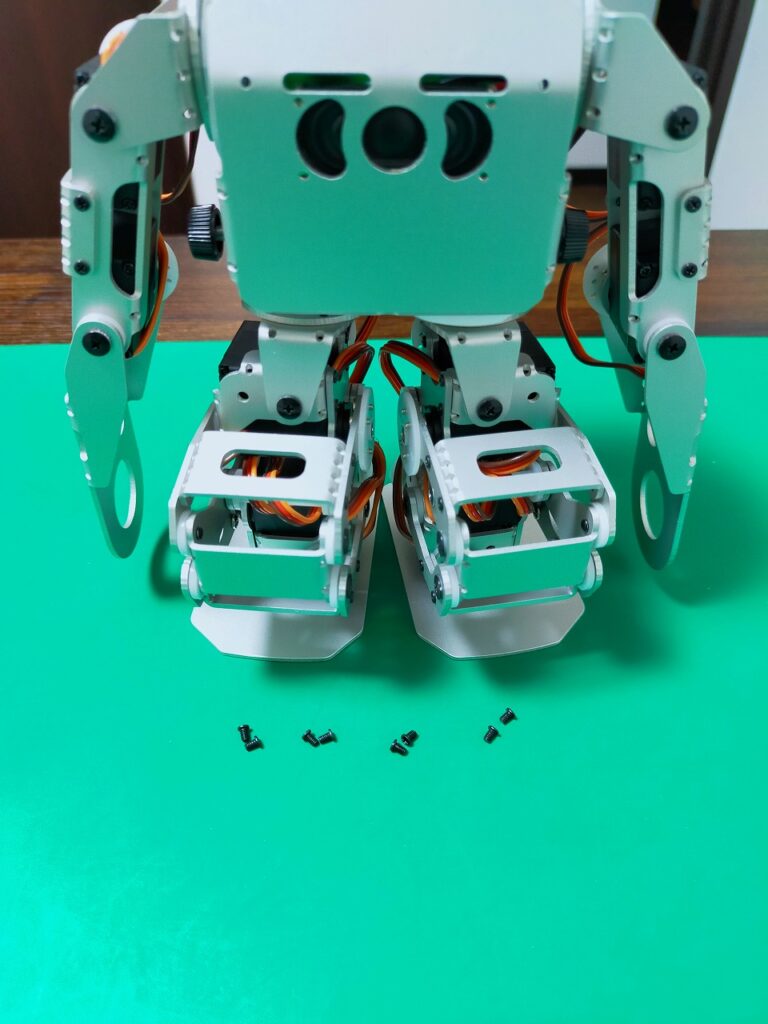
付属のネジNAM2-3低頭ナベが8個余りました。
サーボモータの位置補正
ロボット本体のスイッチがOFFなのを確認し、PC⇔CPUボード⇔バッテリーを接続します。
基本的には取扱説明書にある「5 脚ヨー軸の補正」の通りに補正するのみです。
調整が完了したらCPUボードへの書き込みを行い、サーボモータの位置補正完了です。
サーボモータの位置補正は経験済みなので楽勝です!
手順は同じですが、ここでしっかりと補正を行うようにしましょう。
Robovie-nano(ロボビーナノ)の操作
モードスイッチの切り替え
ロボット本体のモードスイッチを「2」に切り替えます。
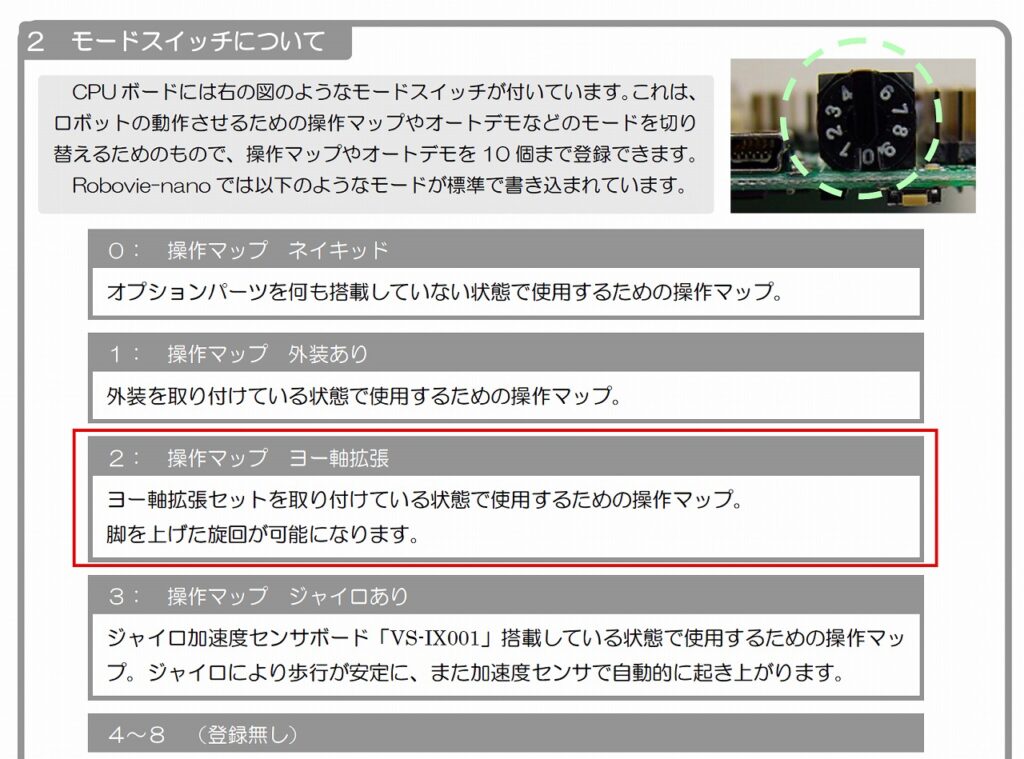
【出典:Robovie-nano取扱説明書(ver1.04)72ページ目】
コントローラでの操作
今回もせっかくなので動画にしてみました。
初めて側転に成功したところが撮影できました。
YAW軸の追加で旋回がスムーズになりました!
はい、脚部の整備をしたためか側転も成功してよかったですね。
大腿ブラケットが狭いのに無理やり入れていた右大腿部のサーボが壊れていました。
大腿ブラケットを広げたうえで頭のサーボを使い解決しています。
代わりの頭のサーボは家にあったケーブルが切れているダミーのサーボとなりました。
はぁ~部品を付け替えたり、調整して側転を成功させるの面白すぎる!
最初から床で動かしておけば良かったと反省しています。
側転の成功、おめでとうございます。
今回はここまでにしましょう。
まとめ:文系出身でも二足歩行ロボットはいじれる!
以上で【Robovie-nano】文系出身だけど二足歩行ロボットをいじりたい!【YAW軸拡張編】の説明は終わりです。
お疲れ様でした。
本体をばらしたり組み立てたりを繰り返していると、どんどん愛着がわいてきます。
やっと側転が成功した姿を見たときには「すげー!」とメチャクチャ興奮しました。
引き続きRobovie-nanoのオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。


コメント