今回も二足歩行ロボットのRobovie-nano(ロボビーナノ)の記事なの。
「二足歩行ロボットに興味はあるけど、文系で物理とか電気とか機械とか全然分からない」
そんな人のために、同じ境遇の私が説明していく記事です。
YAW軸セットとジャイロ・加速度センサ拡張セットの両立は可能か?
RobovieMaker2でのモーション追加
RobovieMaker2のファイルをいじる
モーションファイル
RobovieMaker2のプロジェクトフォルダを見ていくと「Robovie-nanoモーションファイル」フォルダがあり、その中には以下のフォルダがあります。
- サッカー
- その他
- バトル
- ヨー軸拡張
- 移動
「その他」フォルダの中ある以下の3ファイルが見るべきものです。
- うつぶせ起き上がり.txt
- 加速度判別起き上がり.txt
- 仰向け起き上がり.txt
「ヨー軸拡張」フォルダの中にある以下の2ファイルが見るべきものです。
- うつぶせ起き上がり_ヨー軸拡張.txt
- 仰向け起き上がり_ヨー軸拡張.txt
モーションファイルは拡張子が「.txt」なので、まんまテキストファイルなのですが中身は見て分かるものではありません。
そのため、RobovieMaker2で各モーションファイルを開き、PrintScreenしてから比較しました。
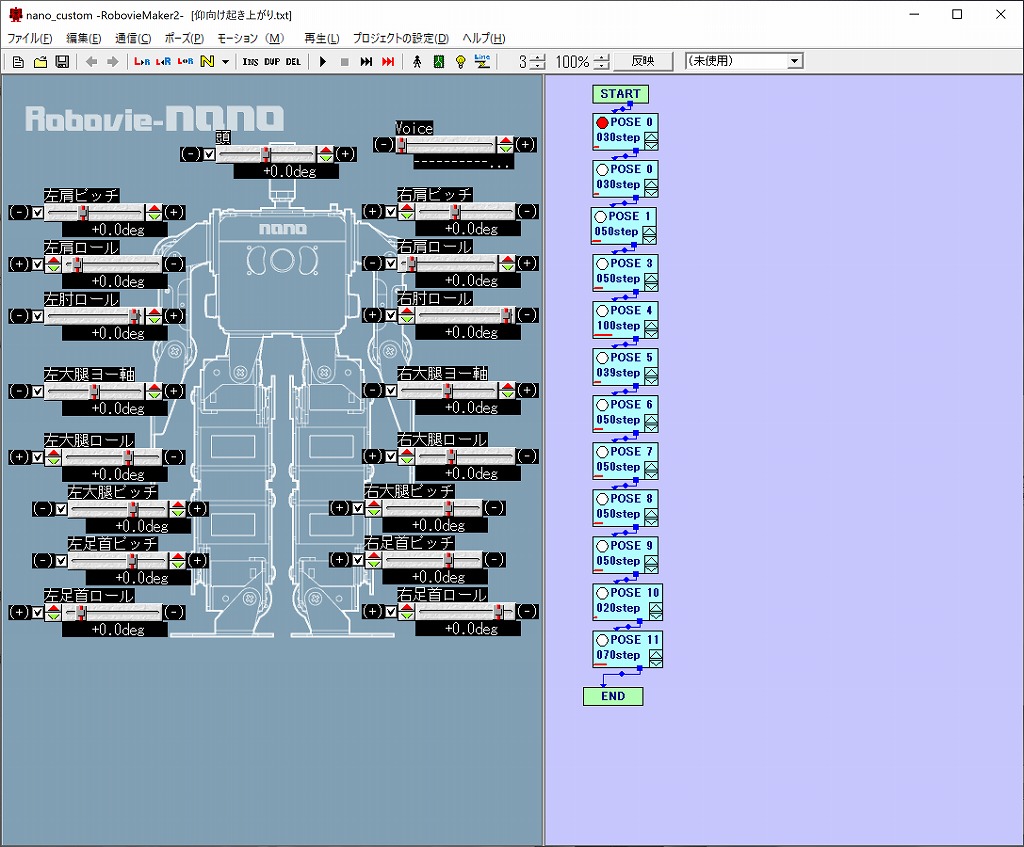
とりあえず、「仰向け起き上がり.txt」と「加速度判別起き上がり.txt」での違いは左肩ピッチと右肩ピッチの値だけ違うということが分かりました。
「仰向け起き上がり.txt」のPOSE1はこんな感じです。
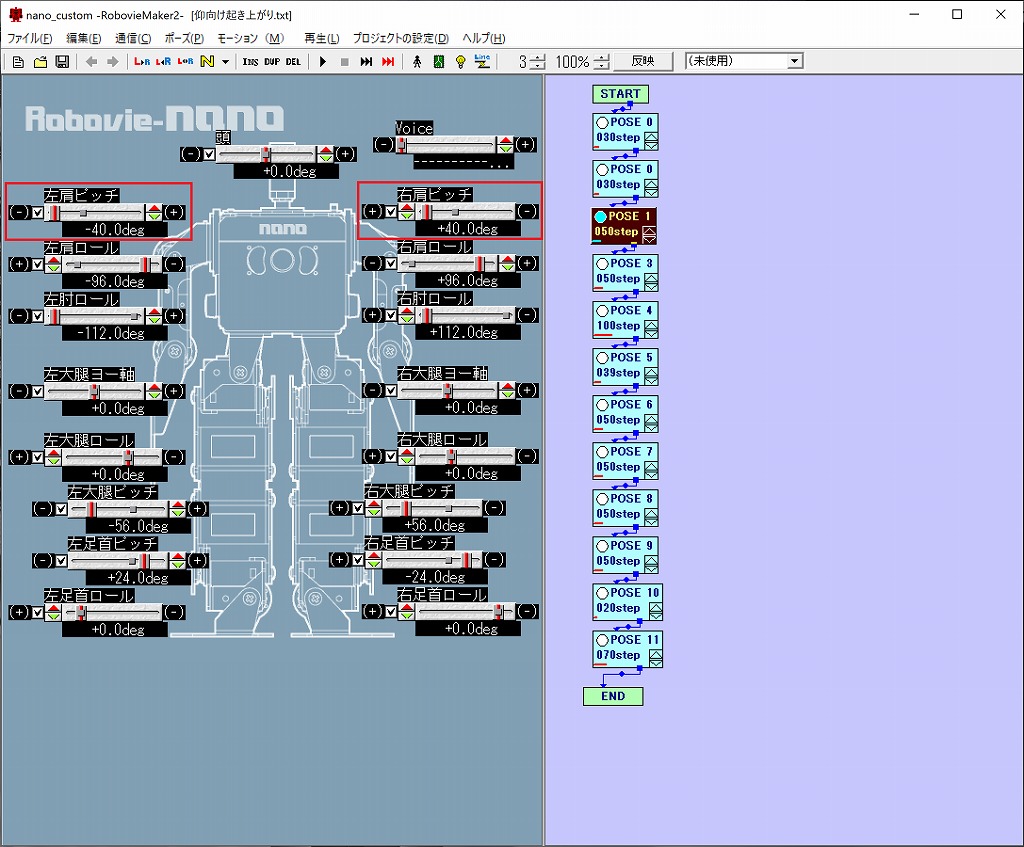
「加速度判別起き上がり.txt」の仰向け側のPOSE1はこんな感じです。
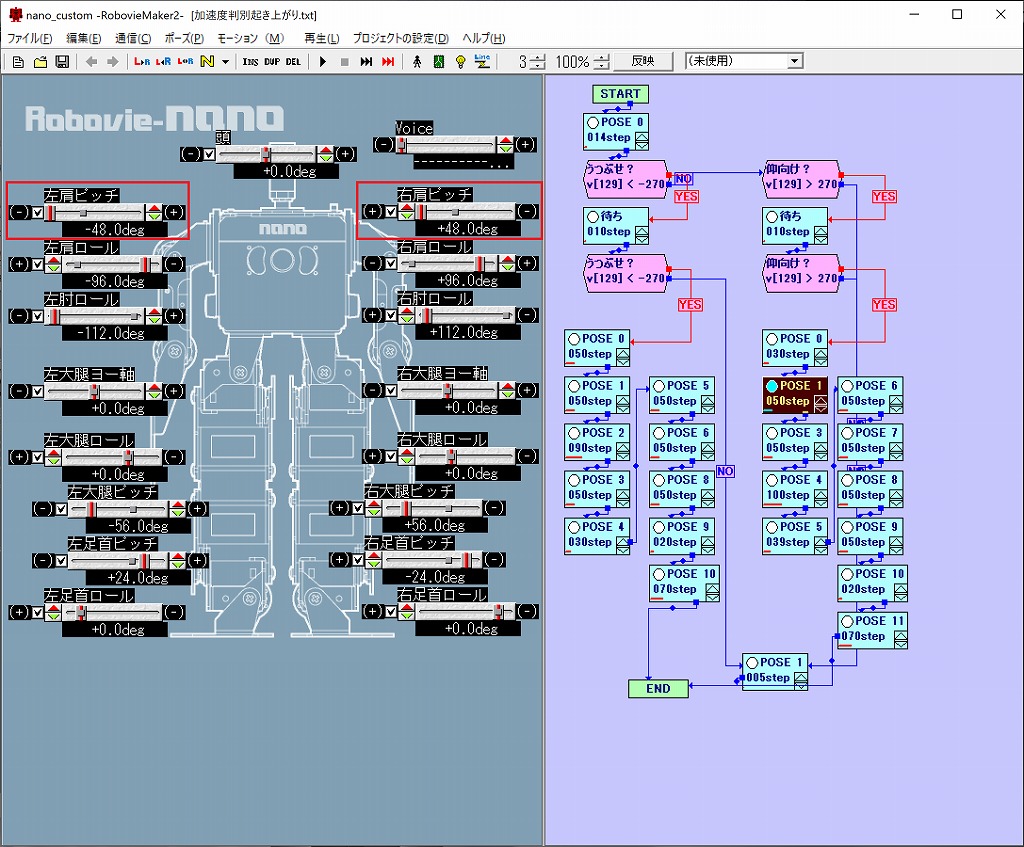
この違いはジャイロ・加速度センサを取り付け用フレームで本体につけると、ランドセル?部分がノーマルより高くなるためではないかと思っています。
さて、「加速度判別起き上がり.txt」と「仰向け起き上がり_ヨー軸拡張.txt」の違いですが、それほどなかったように感じます。
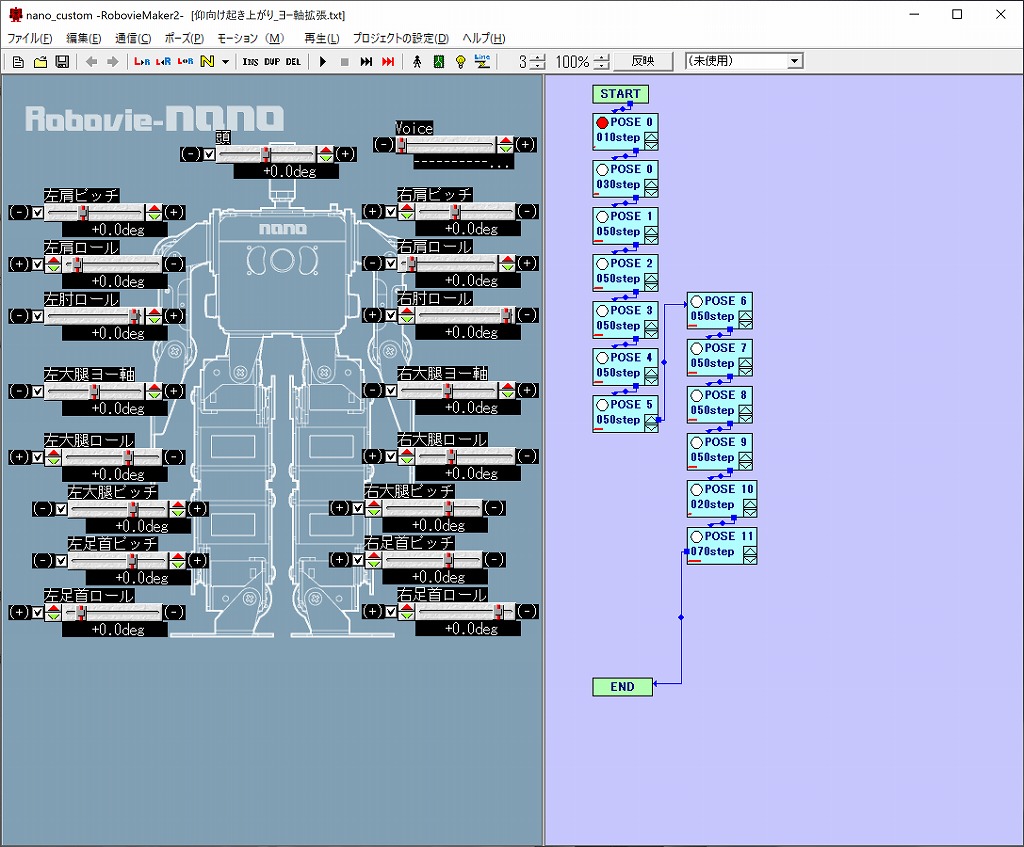
「加速度判別起き上がり.txt」の仰向け側のPOSE11側から順番に反映させて終わりです。
「加速度判別起き上がり_ヨー軸拡張.txt」という名前で「その他」フォルダに保存しました。
その後、「加速度判別起き上がり.txt」のうつぶせ側も同様に「うつぶせ起き上がり_ヨー軸拡張.txt」の設定をさせて「加速度判別起き上がり_ヨー軸拡張.txt」を上書きしました。
自分で設定するのが面倒な方は以下に「加速度判別起き上がり_ヨー軸拡張.txt」を配置しましたのでダウンロードしてご利用ください。
なお、各モーションファイルをRobovieMaker2で読み込み、それぞれPOSEを選択した状態でPrintScreenした画像があるのですが、意味がなさそうなので載せません。
モードスイッチ設定のファイル
作成したモーションファイルを反映させるためには、CPUボードにモードスイッチ設定を書き込む際のファイルも作成・編集する必要があります。
RobovieMaker2のプロジェクトクトフォルダにある「操作マップ_ヨー軸拡張.rsc」や「操作マップ_ジャイロあり.rsc」です。
このファイルは拡張子こそ「.rsc」ですが、中身はテキストファイルです。
「操作マップ_ヨー軸拡張.rsc」をベースに、「操作マップ_ヨー軸拡張_ジャイロあり.rsc」を作成します。
「操作マップ_ヨー軸拡張.rsc」にて以下の様になっている部分があります。
PROPOMAP2_FILE:[241]-[512]-[4]-[64]-[0]-[[Robovie-nanoモーションファイル\ヨー軸拡張\仰向け起き上がり_ヨー軸拡張.txt]]
PROPOMAP2_FILE:[241]-[1024]-[4]-[64]-[0]-[[Robovie-nanoモーションファイル\ヨー軸拡張\うつぶせ起き上がり_ヨー軸拡張.txt]]
そこを以下の様に書き換えて作成したモーションファイルを使うように変更します。
PROPOMAP2_FILE:[129]-[65266]-[2]-[0]-[0]-[[Robovie-nanoモーションファイル\その他\加速度判別起き上がり_ヨー軸拡張.txt]]
PROPOMAP2_FILE:[129]-[270]-[1]-[0]-[0]-[[Robovie-nanoモーションファイル\その他\加速度判別起き上がり_ヨー軸拡張.txt]]
自分で設定するのが面倒な方は以下に「操作マップ_ヨー軸拡張_ジャイロあり.rsc」を配置しましたのでダウンロードしてご利用ください。
※なお、拡張子が「rsc」だとアップロードできなかったため、「txt」となっていますが、RobovieMaker2に読ませる際には「rsc」へと変更してください。
以上でファイルの作成・編集は終わりです。
CPUボードへの書き込み
ロボット本体のスイッチがOFFなのを確認し、PC⇔CPUボード⇔バッテリーを接続します。
※今回はCPUボードへの書き込みだけでサーボ動かさないためバッテリーなくて良さそうです
RobovieMaker2を起動後に通信ボタンをクリックします。
ツールバーの プロジェクトの設定 > モードスイッチ/音声の設定・書き込み からモードスイッチ/音声マップの設定・CPUへの書き込みダイアログを表示します。
「モードスイッチ設定」グループボックス内にある表の番号4の行を選択した状態で「割り当て」ボタンをクリックします。
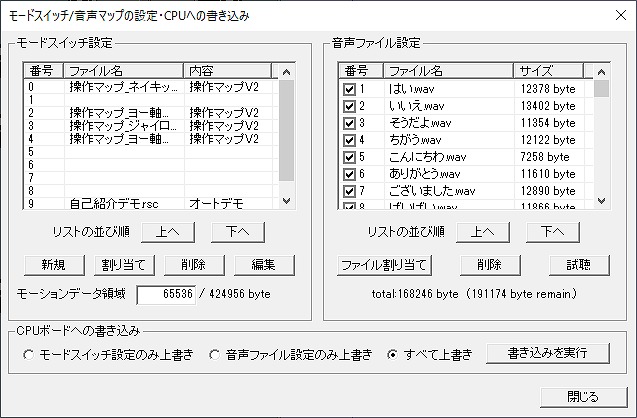
ファイルの割り当てダイアログが表示されるので、作成した「操作マップ_ヨー軸拡張_ジャイロあり.rsc」を選択します。
なお、追加しただけで「CPUボードへの書き込み」を実行すると、CPUボード側の容量不足の警告が出ました。
そのため、番号1にあった「操作マップ_外装あり.rsc」を選択し、「削除」ボタンで消しました。
※外装セットは販売終わっているので使うことはないだろうという考えによります
Robovie-nano(ロボビーナノ)の操作
モードスイッチの切り替え
ロボット本体のモードスイッチを「4」に切り替えます。
実際の動きについて
動作の変化については実際に見るのが一番ということで今回も動画にしてみました。
YAW軸を使った歩行・旋回をしつつ、自動起き上がりにも成功しています。
2つの拡張セットの機能を漏れなく使えるようになりました!
RobovieMaker2の使い方も分かりましたね。
今回はここまでにしましょう。
YouTube動画作成にも慣れてきました。
まとめ:YAW軸セットとジャイロ・加速度センサ拡張セットの両立は可能!
以上で【Robovie-nano】YAW軸セットとジャイロ・加速度センサセットの両立【RobovieMaker2】の説明は終わりです。
お疲れ様でした。
Robovie-nanoがジャイロ・加速度センサで転倒しにくくなったうえ、YAW軸で旋回もスムーズとなりました。
引き続きRobovie-nanoのオプションパーツの実装などを記事にしていきますので、ご縁がありましたら、またお会いしましょう!
皆さんもハッピーロボットライフをお過ごしください。

コメント